 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Gaussian Filtering using a Pseudo Measurement
Paper and Code
May 30, 2016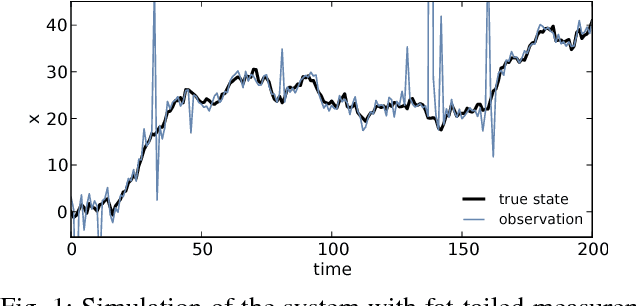
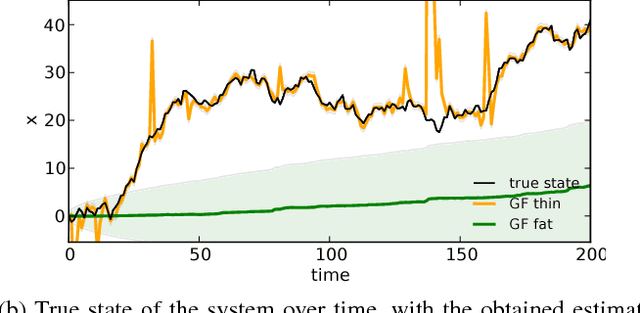
Many sensors, such as range, sonar, radar, GPS and visual devices, produce measurements which are contaminated by outliers. This problem can be addressed by using fat-tailed sensor models, which account for the possibility of outliers. Unfortunately, all estimation algorithms belonging to the family of Gaussian filters (such as the widely-used extended Kalman filter and unscented Kalman filter) are inherently incompatible with such fat-tailed sensor models. The contribution of this paper is to show that any Gaussian filter can be made compatible with fat-tailed sensor models by applying one simple change: Instead of filtering with the physical measurement, we propose to filter with a pseudo measurement obtained by applying a feature function to the physical measurement. We derive such a feature function which is optimal under some conditions. Simulation results show that the proposed method can effectively handle measurement outliers and allows for robust filtering in both linear and nonlinear systems.