 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Based Object Tracking Using a Robust Gaussian Filter
Paper and Code
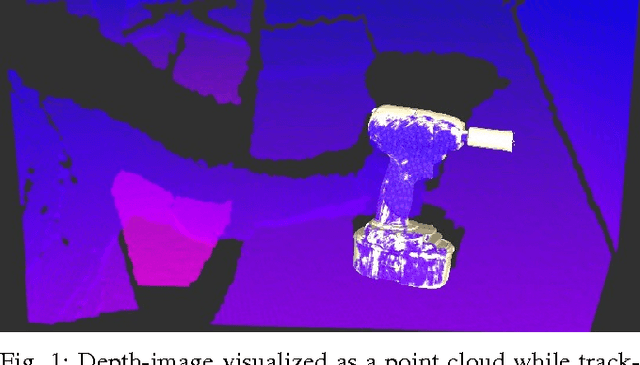
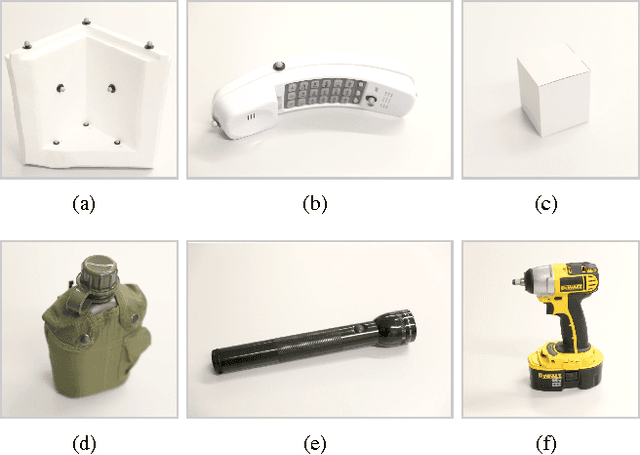
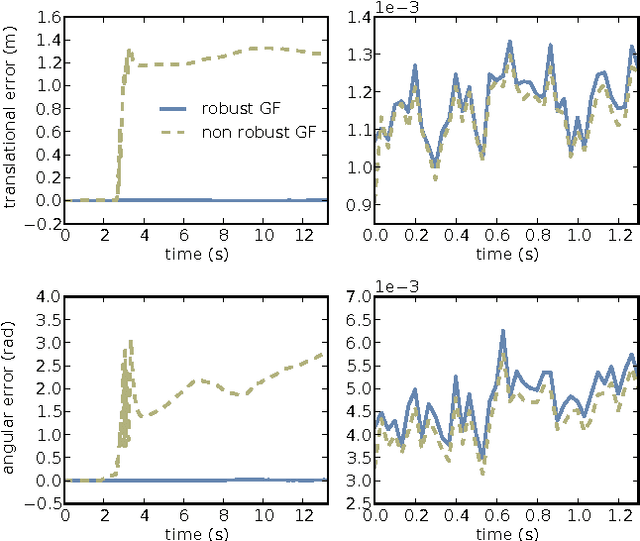
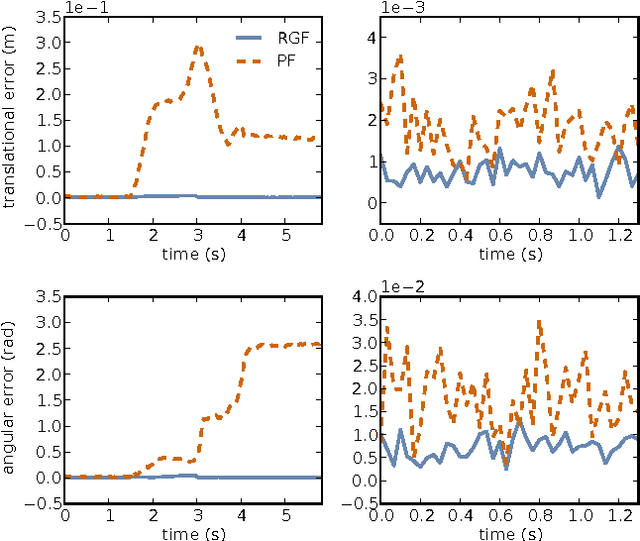
We consider the problem of model-based 3D-tracking of objects given dense depth images as input. Two difficulties preclude the application of a standard Gaussian filter to this problem. First of all, depth sensors are characterized by fat-tailed measurement noise. To address this issue, we show how a recently published robustification method for Gaussian filters can be applied to the problem at hand. Thereby, we avoid using heuristic outlier detection methods that simply reject measurements if they do not match the model. Secondly, the computational cost of the standard Gaussian filter is prohibitive due to the high-dimensional measurement, i.e. the depth image. To address this problem, we propose an approximation to reduce the computational complexity of the filter. In quantitative experiments on real data we show how our method clearly outperforms the standard Gaussian filter. Furthermore, we compare its performance to a particle-filter-based tracking method, and observe comparable computational efficiency and improved accuracy and smoothness of the estimates.