 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Global-Local loop: what is missing in bridging the gap between geospatial data from numerous communities?
Mar 19, 2026We face a unprecedented amount of geospatial data, describing directly or indirectly the Earth Surface at multiple spatial, temporal, and semantic scales, and stemming from numerous contributors, from satellites to citizens. The main challenge in all the geospatial-related communities lies in suitably leveraging a combination of some of the sources for either a generic or a thematic application. Certain data fusion schemes are predominantly exploited: they correspond to popular tasks with mainstream data sources, e.g., free archives of Sentinel images coupled with OpenStreetMap data under an open and widespread deep-learning backbone for land-cover mapping purposes. Most of these approaches unfortunately operate under a "master-slave" paradigm, where one source is basically integrated to help processing the "main" source, without mutual advantages (e.g., large-scale estimation of a given biophysical variable using in-situ observations) and under a specific community bias. We argue that numerous key data fusion configurations, and in particular the effort in symmetrizing the exploitation of multiple data sources, are insufficiently addressed while being highly beneficial for generic or thematic applications. Bridges and retroactions between scales, communities and their respective sources are lacking, neglecting the utmost potential of such a "global-local loop". In this paper, we propose to establish the most relevant interaction schemes through illustrative use cases. We subsequently discuss under-explored research directions that could take advantage of leveraging available data through multiples extents and communities.
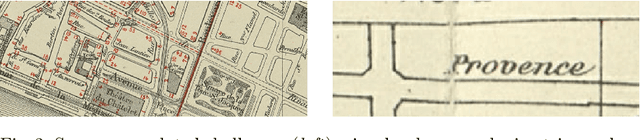
Deep learning enables urban change profiling through alignment of historical maps
Feb 02, 2026Prior to modern Earth observation technologies, historical maps provide a unique record of long-term urban transformation and offer a lens on the evolving identity of cities. However, extracting consistent and fine-grained change information from historical map series remains challenging due to spatial misalignment, cartographic variation, and degrading document quality, limiting most analyses to small-scale or qualitative approaches. We propose a fully automated, deep learning-based framework for fine-grained urban change analysis from large collections of historical maps, built on a modular design that integrates dense map alignment, multi-temporal object detection, and change profiling. This framework shifts the analysis of historical maps from ad hoc visual comparison toward systematic, quantitative characterization of urban change. Experiments demonstrate the robust performance of the proposed alignment and object detection methods. Applied to Paris between 1868 and 1937, the framework reveals the spatial and temporal heterogeneity in urban transformation, highlighting its relevance for research in the social sciences and humanities. The modular design of our framework further supports adaptation to diverse cartographic contexts and downstream applications.
GeoMultiTaskNet: remote sensing unsupervised domain adaptation using geographical coordinates
Apr 16, 2023Land cover maps are a pivotal element in a wide range of Earth Observation (EO) applications. However, annotating large datasets to develop supervised systems for remote sensing (RS) semantic segmentation is costly and time-consuming. Unsupervised Domain Adaption (UDA) could tackle these issues by adapting a model trained on a source domain, where labels are available, to a target domain, without annotations. UDA, while gaining importance in computer vision, is still under-investigated in RS. Thus, we propose a new lightweight model, GeoMultiTaskNet, based on two contributions: a GeoMultiTask module (GeoMT), which utilizes geographical coordinates to align the source and target domains, and a Dynamic Class Sampling (DCS) strategy, to adapt the semantic segmentation loss to the frequency of classes. This approach is the first to use geographical metadata for UDA in semantic segmentation. It reaches state-of-the-art performances (47,22% mIoU), reducing at the same time the number of parameters (33M), on a subset of the FLAIR dataset, a recently proposed dataset properly shaped for RS UDA, used for the first time ever for research scopes here.
Multi-Layer Modeling of Dense Vegetation from Aerial LiDAR Scans
Apr 25, 2022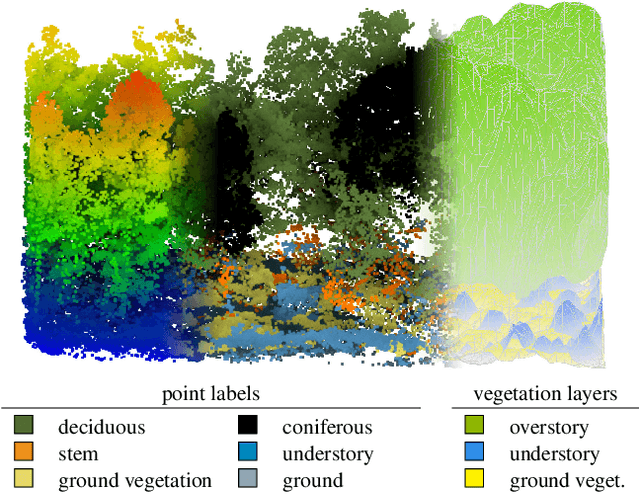

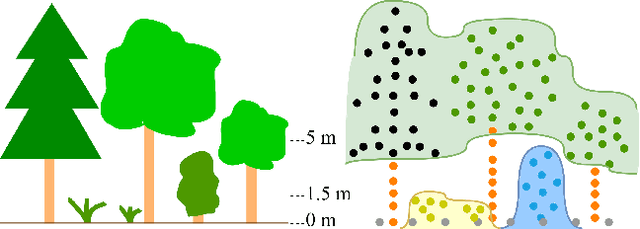
The analysis of the multi-layer structure of wild forests is an important challenge of automated large-scale forestry. While modern aerial LiDARs offer geometric information across all vegetation layers, most datasets and methods focus only on the segmentation and reconstruction of the top of canopy. We release WildForest3D, which consists of 29 study plots and over 2000 individual trees across 47 000m2 with dense 3D annotation, along with occupancy and height maps for 3 vegetation layers: ground vegetation, understory, and overstory. We propose a 3D deep network architecture predicting for the first time both 3D point-wise labels and high-resolution layer occupancy rasters simultaneously. This allows us to produce a precise estimation of the thickness of each vegetation layer as well as the corresponding watertight meshes, therefore meeting most forestry purposes. Both the dataset and the model are released in open access: https://github.com/ekalinicheva/multi_layer_vegetation.
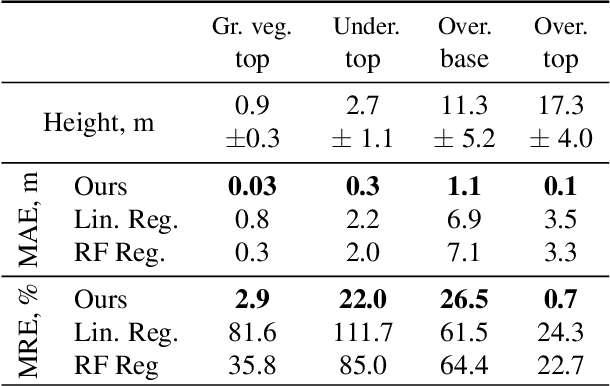
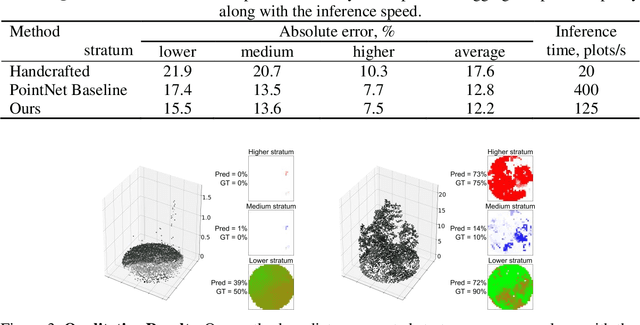
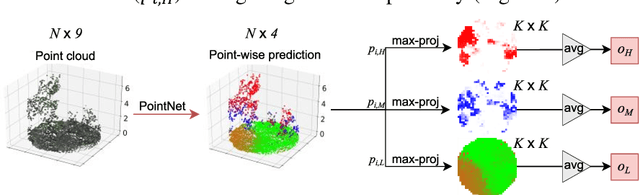
Predicting Vegetation Stratum Occupancy from Airborne LiDAR Data with Deep Learning
Jan 20, 2022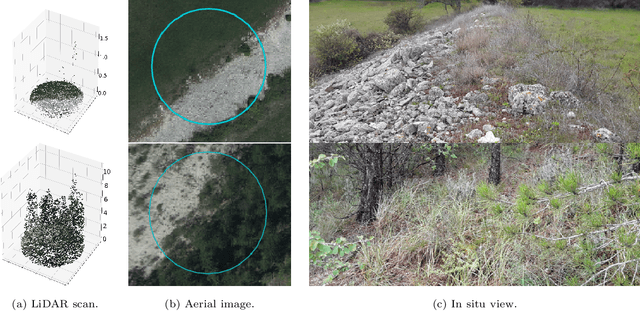
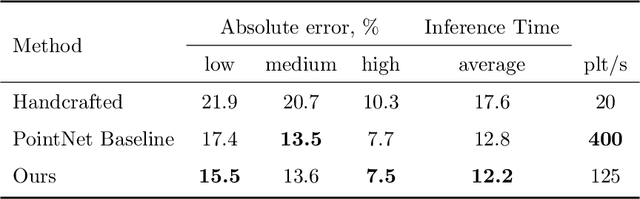
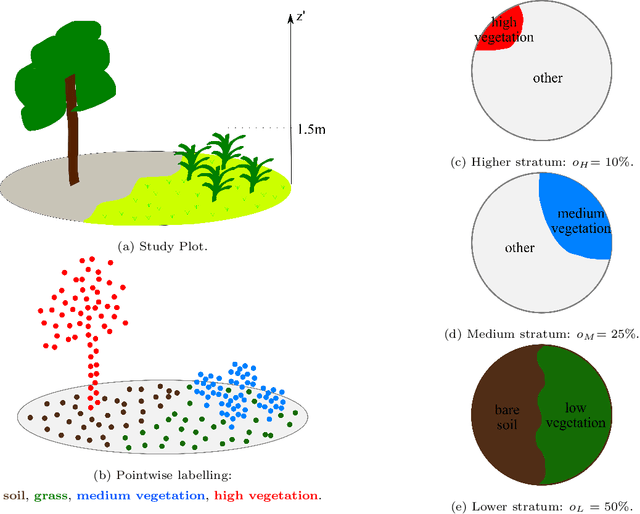
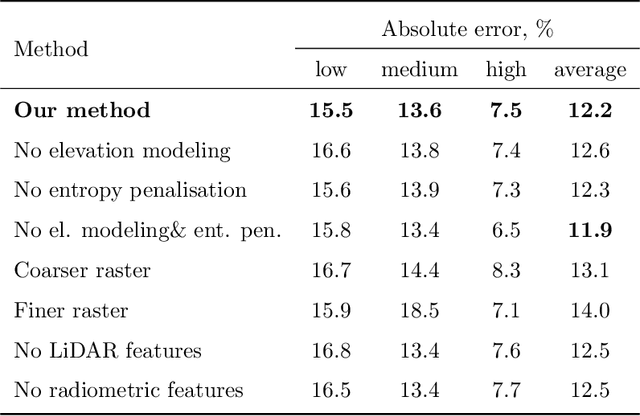
We propose a new deep learning-based method for estimating the occupancy of vegetation strata from airborne 3D LiDAR point clouds. Our model predicts rasterized occupancy maps for three vegetation strata corresponding to lower, medium, and higher cover. Our weakly-supervised training scheme allows our network to only be supervised with vegetation occupancy values aggregated over cylindrical plots containing thousands of points. Such ground truth is easier to produce than pixel-wise or point-wise annotations. Our method outperforms handcrafted and deep learning baselines in terms of precision by up to 30%, while simultaneously providing visual and interpretable predictions. We provide an open-source implementation along with a dataset of 199 agricultural plots to train and evaluate weakly supervised occupancy regression algorithms.
Vegetation Stratum Occupancy Prediction from Airborne LiDAR 3D Point Clouds
Dec 27, 2021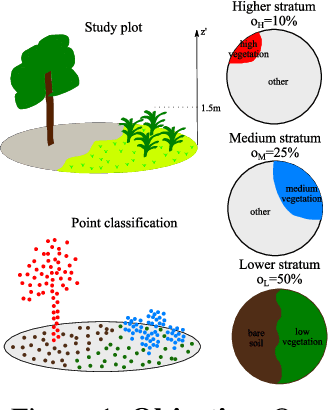
We propose a new deep learning-based method for estimating the occupancy of vegetation strata from 3D point clouds captured from an aerial platform. Our model predicts rasterized occupancy maps for three vegetation strata: lower, medium, and higher strata. Our training scheme allows our network to only being supervized with values aggregated over cylindrical plots, which are easier to produce than pixel-wise or point-wise annotations. Our method outperforms handcrafted and deep learning baselines in terms of precision while simultaneously providing visual and interpretable predictions. We provide an open-source implementation of our method along along a dataset of 199 agricultural plots to train and evaluate occupancy regression algorithms.
ICDAR 2021 Competition on Historical Map Segmentation
May 27, 2021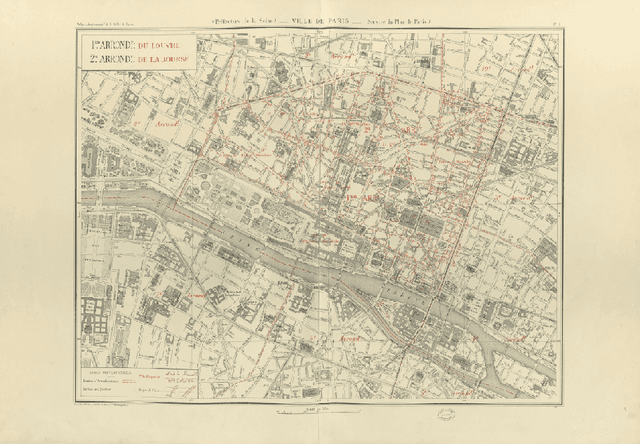
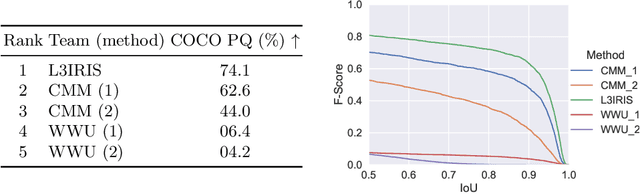
This paper presents the final results of the ICDAR 2021 Competition on Historical Map Segmentation (MapSeg), encouraging research on a series of historical atlases of Paris, France, drawn at 1/5000 scale between 1894 and 1937. The competition featured three tasks, awarded separately. Task~1 consists in detecting building blocks and was won by the L3IRIS team using a DenseNet-121 network trained in a weakly supervised fashion. This task is evaluated on 3 large images containing hundreds of shapes to detect. Task~2 consists in segmenting map content from the larger map sheet, and was won by the UWB team using a U-Net-like FCN combined with a binarization method to increase detection edge accuracy. Task~3 consists in locating intersection points of geo-referencing lines, and was also won by the UWB team who used a dedicated pipeline combining binarization, line detection with Hough transform, candidate filtering, and template matching for intersection refinement. Tasks~2 and~3 are evaluated on 95 map sheets with complex content. Dataset, evaluation tools and results are available under permissive licensing at \url{https://icdar21-mapseg.github.io/}.
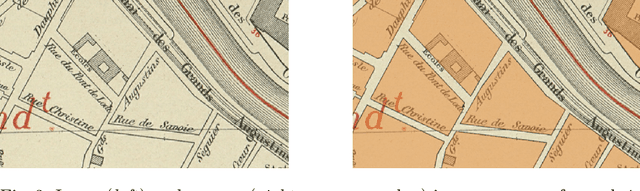
Combining Deep Learning and Mathematical Morphology for Historical Map Segmentation
Jan 06, 2021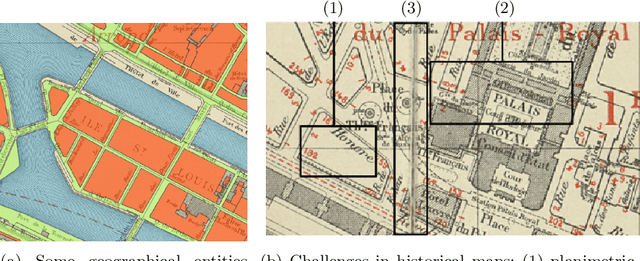
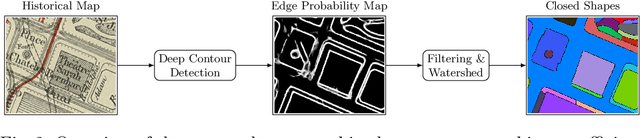

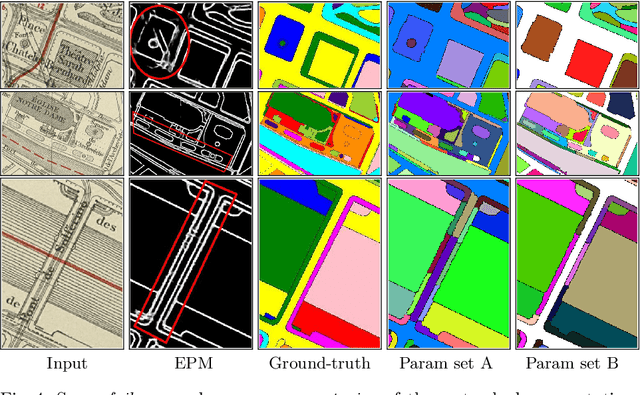
The digitization of historical maps enables the study of ancient, fragile, unique, and hardly accessible information sources. Main map features can be retrieved and tracked through the time for subsequent thematic analysis. The goal of this work is the vectorization step, i.e., the extraction of vector shapes of the objects of interest from raster images of maps. We are particularly interested in closed shape detection such as buildings, building blocks, gardens, rivers, etc. in order to monitor their temporal evolution. Historical map images present significant pattern recognition challenges. The extraction of closed shapes by using traditional Mathematical Morphology (MM) is highly challenging due to the overlapping of multiple map features and texts. Moreover, state-of-the-art Convolutional Neural Networks (CNN) are perfectly designed for content image filtering but provide no guarantee about closed shape detection. Also, the lack of textural and color information of historical maps makes it hard for CNN to detect shapes that are represented by only their boundaries. Our contribution is a pipeline that combines the strengths of CNN (efficient edge detection and filtering) and MM (guaranteed extraction of closed shapes) in order to achieve such a task. The evaluation of our approach on a public dataset shows its effectiveness for extracting the closed boundaries of objects in historical maps.