 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRock the KASBA: Blazingly Fast and Accurate Time Series Clustering
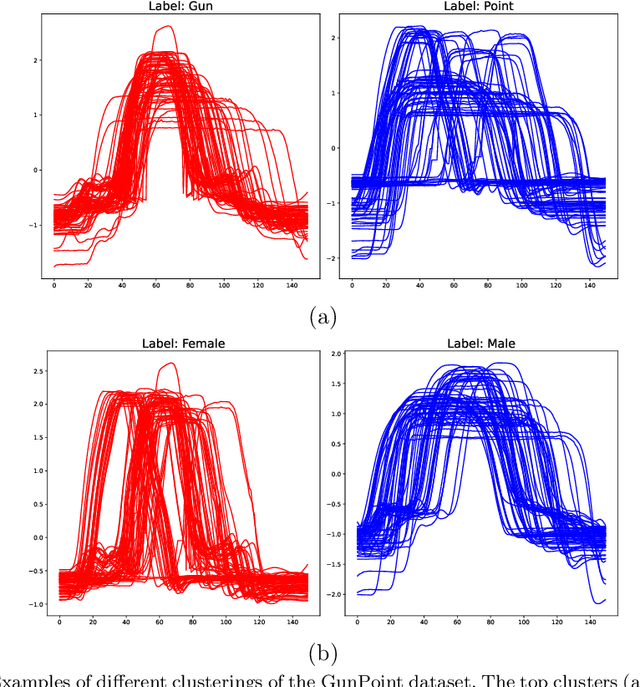
Nov 26, 2024Time series data has become increasingly prevalent across numerous domains, driving a growing demand for time series machine learning techniques. Among these, time series clustering (TSCL) stands out as one of the most popular machine learning tasks. TSCL serves as a powerful exploratory analysis tool and is also employed as a preprocessing step or subroutine for various tasks, including anomaly detection, segmentation, and classification. The most popular TSCL algorithms are either fast (in terms of run time) but perform poorly on benchmark problems, or perform well on benchmarks but scale poorly. We present a new TSCL algorithm, the $k$-means (K) accelerated (A) Stochastic subgradient (S) Barycentre (B) Average (A) (KASBA) clustering algorithm. KASBA is a $k$-means clustering algorithm that uses the Move-Split-Merge (MSM) elastic distance at all stages of clustering, applies a randomised stochastic subgradient gradient descent to find barycentre centroids, links each stage of clustering to accelerate convergence and exploits the metric property of MSM distance to avoid a large proportion of distance calculations. It is a versatile and scalable clusterer designed for real-world TSCL applications. It allows practitioners to balance run time and clustering performance. We demonstrate through extensive experimentation that KASBA produces significantly better clustering than the faster state of the art clusterers and is offers orders of magnitude improvement in run time over the most performant $k$-means alternatives.
On time series clustering with k-means
Oct 18, 2024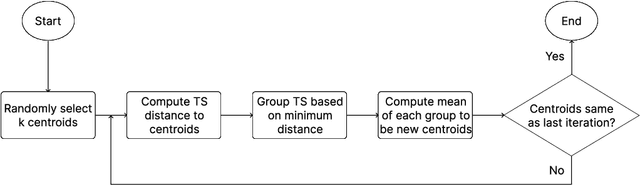


There is a long history of research into time series clustering using distance-based partitional clustering. Many of the most popular algorithms adapt k-means (also known as Lloyd's algorithm) to exploit time dependencies in the data by specifying a time series distance function. However, these algorithms are often presented with k-means configured in various ways, altering key parameters such as the initialisation strategy. This variability makes it difficult to compare studies because k-means is known to be highly sensitive to its configuration. To address this, we propose a standard Lloyd's-based model for TSCL that adopts an end-to-end approach, incorporating a specialised distance function not only in the assignment step but also in the initialisation and stopping criteria. By doing so, we create a unified structure for comparing seven popular Lloyd's-based TSCL algorithms. This common framework enables us to more easily attribute differences in clustering performance to the distance function itself, rather than variations in the k-means configuration.
aeon: a Python toolkit for learning from time series
Jun 20, 2024aeon is a unified Python 3 library for all machine learning tasks involving time series. The package contains modules for time series forecasting, classification, extrinsic regression and clustering, as well as a variety of utilities, transformations and distance measures designed for time series data. aeon also has a number of experimental modules for tasks such as anomaly detection, similarity search and segmentation. aeon follows the scikit-learn API as much as possible to help new users and enable easy integration of aeon estimators with useful tools such as model selection and pipelines. It provides a broad library of time series algorithms, including efficient implementations of the very latest advances in research. Using a system of optional dependencies, aeon integrates a wide variety of packages into a single interface while keeping the core framework with minimal dependencies. The package is distributed under the 3-Clause BSD license and is available at https://github.com/ aeon-toolkit/aeon. This version was submitted to the JMLR journal on 02 Nov 2023 for v0.5.0 of aeon. At the time of this preprint aeon has released v0.9.0, and has had substantial changes.
Camera Bias in a Fine Grained Classification Task
Jul 16, 2020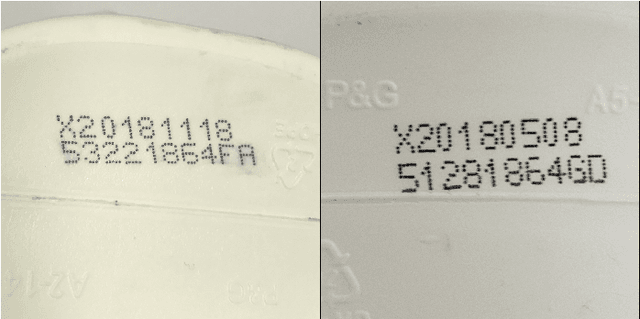
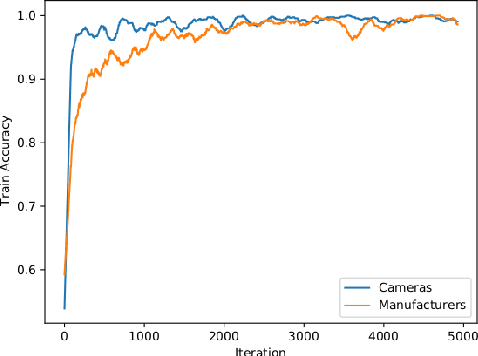
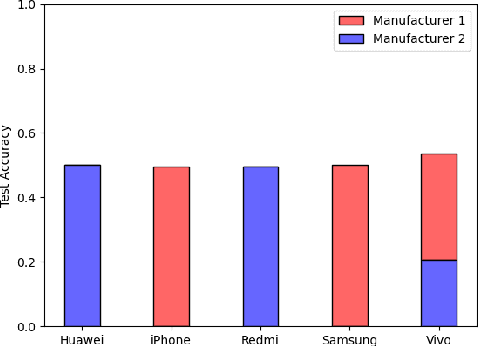
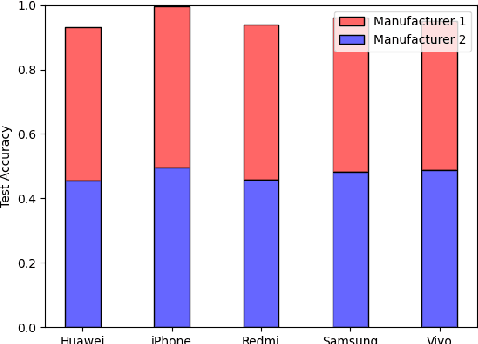
We show that correlations between the camera used to acquire an image and the class label of that image can be exploited by convolutional neural networks (CNN), resulting in a model that "cheats" at an image classification task by recognizing which camera took the image and inferring the class label from the camera. We show that models trained on a dataset with camera / label correlations do not generalize well to images in which those correlations are absent, nor to images from unencountered cameras. Furthermore, we investigate which visual features they are exploiting for camera recognition. Our experiments present evidence against the importance of global color statistics, lens deformation and chromatic aberration, and in favor of high frequency features, which may be introduced by image processing algorithms built into the cameras.
Multi-Task Regression-based Learning for Autonomous Unmanned Aerial Vehicle Flight Control within Unstructured Outdoor Environments
Jul 18, 2019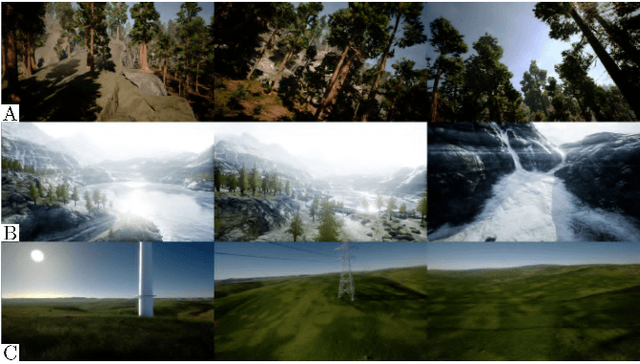
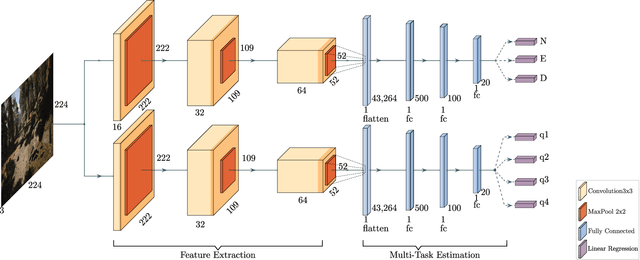
Increased growth in the global Unmanned Aerial Vehicles (UAV) (drone) industry has expanded possibilities for fully autonomous UAV applications. A particular application which has in part motivated this research is the use of UAV in wide area search and surveillance operations in unstructured outdoor environments. The critical issue with such environments is the lack of structured features that could aid in autonomous flight, such as road lines or paths. In this paper, we propose an End-to-End Multi-Task Regression-based Learning approach capable of defining flight commands for navigation and exploration under the forest canopy, regardless of the presence of trails or additional sensors (i.e. GPS). Training and testing are performed using a software in the loop pipeline which allows for a detailed evaluation against state-of-the-art pose estimation techniques. Our extensive experiments demonstrate that our approach excels in performing dense exploration within the required search perimeter, is capable of covering wider search regions, generalises to previously unseen and unexplored environments and outperforms contemporary state-of-the-art techniques.