 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I
Jan 20, 2023
This report reviews all results derived from performance benchmarking conducted during Phase I of the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell, using the test methods specified in the DECISIVE Test Methods Handbook v1.1 for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. Using those 20 test methods, over 230 tests were conducted across 8 sUAS platforms: Cleo Robotics Dronut X1P (P = prototype), FLIR Black Hornet PRS, Flyability Elios 2 GOV, Lumenier Nighthawk V3, Parrot ANAFI USA GOV, Skydio X2D, Teal Golden Eagle, and Vantage Robotics Vesper. Best in class criteria is specified for each applicable test method and the sUAS that match this criteria are named for each test method, including a high-level executive summary of their performance.
DECISIVE Test Methods Handbook: Test Methods for Evaluating sUAS in Subterranean and Constrained Indoor Environments, Version 1.1
Nov 01, 2022
This handbook outlines all test methods developed under the Development and Execution of Comprehensive and Integrated Subterranean Intelligent Vehicle Evaluations (DECISIVE) project by the University of Massachusetts Lowell for evaluating small unmanned aerial systems (sUAS) performance in subterranean and constrained indoor environments, spanning communications, field readiness, interface, obstacle avoidance, navigation, mapping, autonomy, trust, and situation awareness. For sUAS deployment in subterranean and constrained indoor environments, this puts forth two assumptions about applicable sUAS to be evaluated using these test methods: (1) able to operate without access to GPS signal, and (2) width from prop top to prop tip does not exceed 91 cm (36 in) wide (i.e., can physically fit through a typical doorway, although successful navigation through is not guaranteed). All test methods are specified using a common format: Purpose, Summary of Test Method, Apparatus and Artifacts, Equipment, Metrics, Procedure, and Example Data. All test methods are designed to be run in real-world environments (e.g., MOUT sites) or using fabricated apparatuses (e.g., test bays built from wood, or contained inside of one or more shipping containers).
Methods for Combining and Representing Non-Contextual Autonomy Scores for Unmanned Aerial Systems
Nov 14, 2021
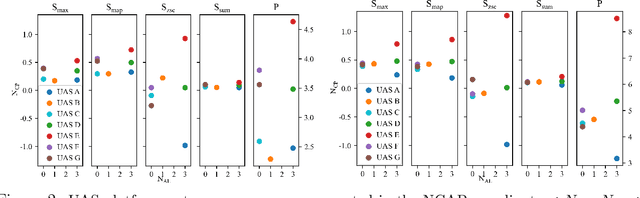
Measuring an overall autonomy score for a robotic system requires the combination of a set of relevant aspects and features of the system that might be measured in different units, qualitative, and/or discordant. In this paper, we build upon an existing non-contextual autonomy framework that measures and combines the Autonomy Level and the Component Performance of a system as overall autonomy score. We examine several methods of combining features, showing how some methods find different rankings of the same data, and we employ the weighted product method to resolve this issue. Furthermore, we introduce the non-contextual autonomy coordinate and represent the overall autonomy of a system with an autonomy distance. We apply our method to a set of seven Unmanned Aerial Systems (UAS) and obtain their absolute autonomy score as well as their relative score with respect to the best system.