 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Darwinism Part II: DataEvolve -- AI can Autonomously Evolve Pretraining Data Curation
Mar 15, 2026Data Darwinism (Part I) established a ten-level hierarchy for data processing, showing that stronger processing can unlock greater data value. However, that work relied on manually designed strategies for a single category. Modern pretraining corpora comprise hundreds of heterogeneous categories spanning domains and content types, each demanding specialized treatment. At this scale, manual strategy design becomes prohibitive. This raises a key question: can strategies evolve in an automated way? We introduce DataEvolve, a framework that enables strategies to evolve through iterative optimization rather than manual design. For each data category, DataEvolve operates in a closed evolutionary loop: it identifies quality issues, generates candidate strategies, executes them on sampled data, evaluates results, and refines approaches across generations. The process accumulates knowledge through an experience pool of discovered issues and a strategy pool tracking performance across iterations. Applied to 8 categories spanning 672B tokens from Nemotron-CC, DataEvolve produces Darwin-CC, a 504B-token dataset with strategies evolved through 30 iterations per category. Training 3B models on 500B tokens, Darwin-CC outperforms raw data (+3.96 points) and achieves a 44.13 average score across 18 benchmarks, surpassing DCLM, Ultra-FineWeb, and FineWeb-Edu, with strong gains on knowledge-intensive tasks such as MMLU. Analysis shows evolved strategies converge on cleaning-focused approaches: targeted noise removal and format normalization with domain-aware preservation, echoing the L4 (Generative Refinement) principles from Part I. Ablation studies confirm iterative evolution is essential: optimized strategies outperform suboptimal ones by 2.93 points, establishing evolutionary strategy design as feasible and necessary for pretraining-scale data curation.
Data Darwinism Part I: Unlocking the Value of Scientific Data for Pre-training
Feb 08, 2026Data quality determines foundation model performance, yet systematic processing frameworks are lacking. We introduce Data Darwinism, a ten-level taxonomy (L0-L9) that conceptualizes data-model co-evolution: advanced models produce superior data for next-generation systems. We validate this on scientific literature by constructing Darwin-Science, a 900B-token corpus (L0-L5). We identify a learnability gap in raw scientific text, which we bridge via L4 (Generative Refinement) and L5 (Cognitive Completion) using frontier LLMs to explicate reasoning and terminology. To ensure rigorous attribution, we pre-trained daVinci-origin-3B/7B models from scratch, excluding scientific content to create contamination-free baselines. After 600B tokens of continued pre-training, Darwin-Science outperforms baselines by +2.12 (3B) and +2.95 (7B) points across 20+ benchmarks, rising to +5.60 and +8.40 points on domain-aligned tasks. Systematic progression to L5 yields a +1.36 total gain, confirming that higher-level processing unlocks latent data value. We release the Darwin-Science corpus and daVinci-origin models to enable principled, co-evolutionary development.
ChipBench: A Next-Step Benchmark for Evaluating LLM Performance in AI-Aided Chip Design
Jan 29, 2026While Large Language Models (LLMs) show significant potential in hardware engineering, current benchmarks suffer from saturation and limited task diversity, failing to reflect LLMs' performance in real industrial workflows. To address this gap, we propose a comprehensive benchmark for AI-aided chip design that rigorously evaluates LLMs across three critical tasks: Verilog generation, debugging, and reference model generation. Our benchmark features 44 realistic modules with complex hierarchical structures, 89 systematic debugging cases, and 132 reference model samples across Python, SystemC, and CXXRTL. Evaluation results reveal substantial performance gaps, with state-of-the-art Claude-4.5-opus achieving only 30.74\% on Verilog generation and 13.33\% on Python reference model generation, demonstrating significant challenges compared to existing saturated benchmarks where SOTA models achieve over 95\% pass rates. Additionally, to help enhance LLM reference model generation, we provide an automated toolbox for high-quality training data generation, facilitating future research in this underexplored domain. Our code is available at https://github.com/zhongkaiyu/ChipBench.git.
The Cardinality of Identifying Code Sets for Soccer Ball Graph with Application to Remote Sensing
Jul 19, 2024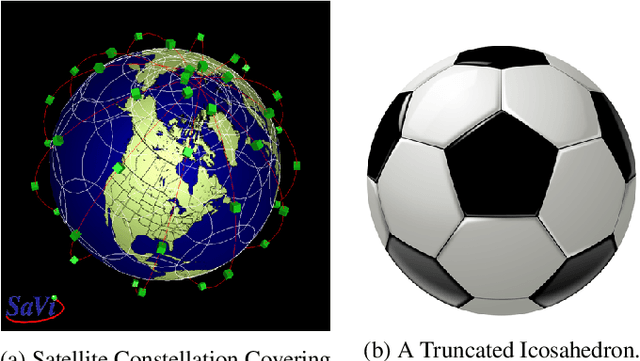
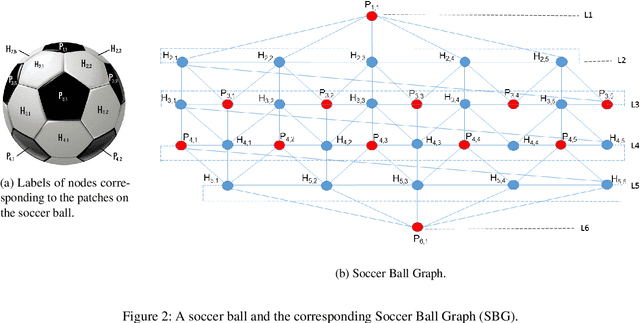
In the context of satellite monitoring of the earth, we can assume that the surface of the earth is divided into a set of regions. We assume that the impact of a big social/environmental event spills into neighboring regions. Using Identifying Code Sets (ICSes), we can deploy sensors in such a way that the region in which an event takes place can be uniquely identified, even with fewer sensors than regions. As Earth is almost a sphere, we use a soccer ball as a model. We construct a Soccer Ball Graph (SBG), and provide human-oriented, analytical proofs that 1) the SBG has at least 26 ICSes of cardinality ten, implying that there are at least 26 different ways to deploy ten satellites to monitor the Earth and 2) that the cardinality of the minimum Identifying Code Set (MICS) for the SBG is at least nine. We then provide a machine-oriented formal proof that the cardinality of the MICS for the SBG is in fact ten, meaning that one must deploy at least ten satellites to monitor the Earth in the SBG model. We also provide machine-oriented proof that there are exactly 26 ICSes of cardinality ten for the SBG.
Recurrent Transformer for Dynamic Graph Representation Learning with Edge Temporal States
Apr 20, 2023



Dynamic graph representation learning is growing as a trending yet challenging research task owing to the widespread demand for graph data analysis in real world applications. Despite the encouraging performance of many recent works that build upon recurrent neural networks (RNNs) and graph neural networks (GNNs), they fail to explicitly model the impact of edge temporal states on node features over time slices. Additionally, they are challenging to extract global structural features because of the inherent over-smoothing disadvantage of GNNs, which further restricts the performance. In this paper, we propose a recurrent difference graph transformer (RDGT) framework, which firstly assigns the edges in each snapshot with various types and weights to illustrate their specific temporal states explicitly, then a structure-reinforced graph transformer is employed to capture the temporal node representations by a recurrent learning paradigm. Experimental results on four real-world datasets demonstrate the superiority of RDGT for discrete dynamic graph representation learning, as it consistently outperforms competing methods in dynamic link prediction tasks.
Decentralized Cooperative Planning for Automated Vehicles with Hierarchical Monte Carlo Tree Search
Jul 25, 2018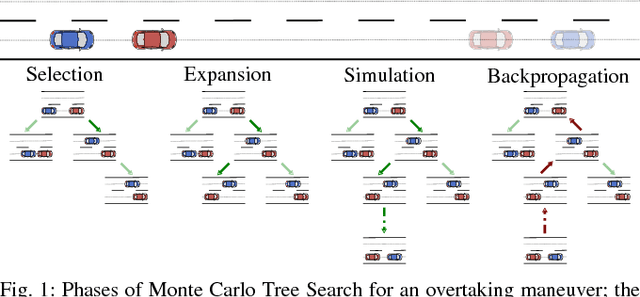
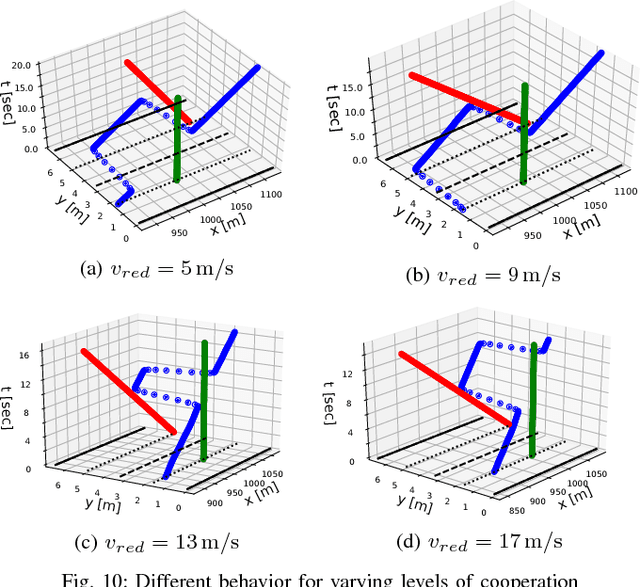
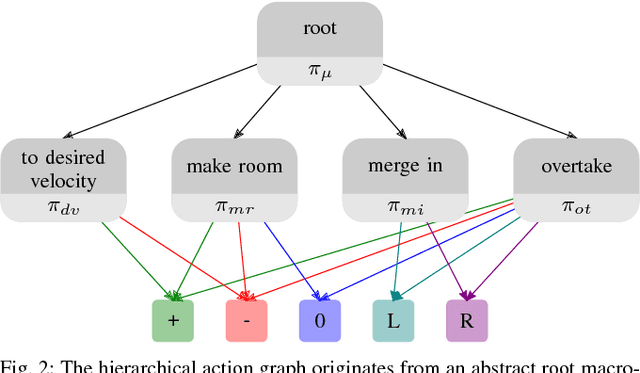
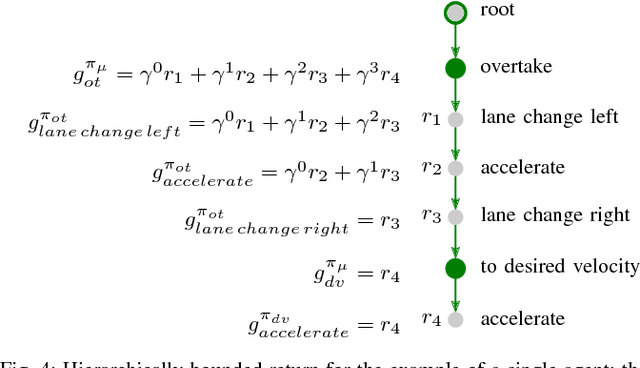
Today's automated vehicles lack the ability to cooperate implicitly with others. This work presents a Monte Carlo Tree Search (MCTS) based approach for decentralized cooperative planning using macro-actions for automated vehicles in heterogeneous environments. Based on cooperative modeling of other agents and Decoupled-UCT (a variant of MCTS), the algorithm evaluates the state-action-values of each agent in a cooperative and decentralized manner, explicitly modeling the interdependence of actions between traffic participants. Macro-actions allow for temporal extension over multiple time steps and increase the effective search depth requiring fewer iterations to plan over longer horizons. Without predefined policies for macro-actions, the algorithm simultaneously learns policies over and within macro-actions. The proposed method is evaluated under several conflict scenarios, showing that the algorithm can achieve effective cooperative planning with learned macro-actions in heterogeneous environments.
CPG-Based Control Scheme for Quadruped Robot to Withstand the Lateral Impact
Nov 21, 2017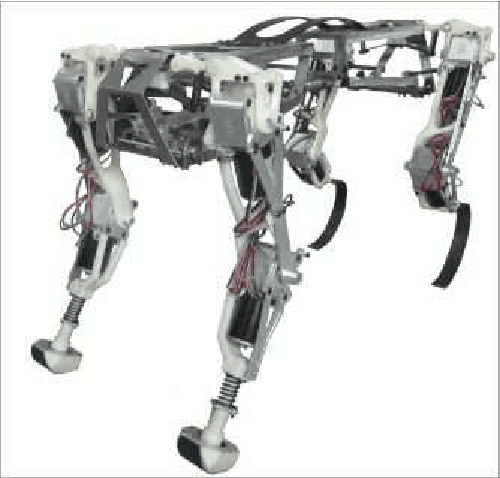
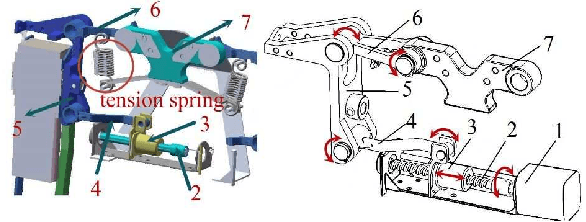
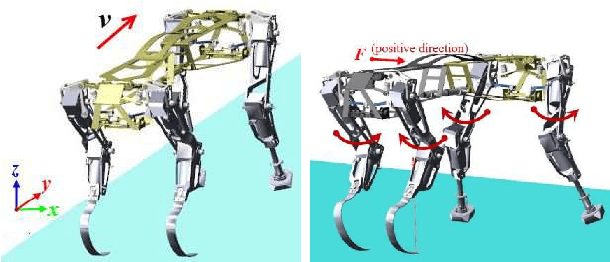
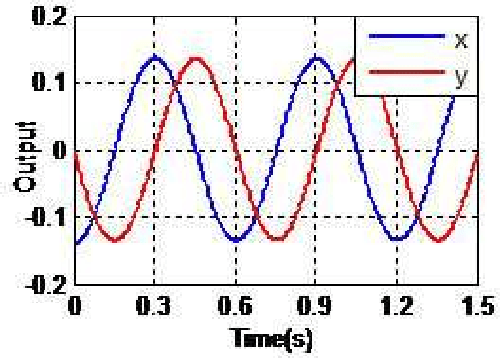
This paper aims to present a stability control strategy for quadruped robot under lateral impact with the help of lateral trot. We firstly propose five necessary conditions for keeping balance. The classical four-neuron Central Pattern Generator (CPG) network with Hopf oscillators is then extended to eight-neuron network with four more trigger-enabled neurons, which controls the lateral trot. With proper adjustment of network's parameters, such network can coordinate the lateral and longitudinal trot gait. Based on Zero Movement Point (ZMP) theory, the robot is modeled as an inverted pendulum to plan the Center of Gravity (CoG) position and calculate the needed lateral step length. The simulation shows that the lateral acceleration of the quadruped robot after lateral impact regains to the normal range in a short time. Comparison shows that the maximal lateral impact that robot can resist increases about 125% from 0.72g to 1.55g.
* extended and translated version of a Chinese journal paper
On Robustness in Multilayer Interdependent Network
Jan 24, 2017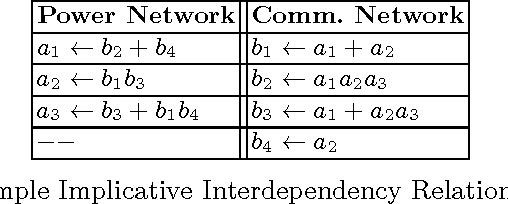
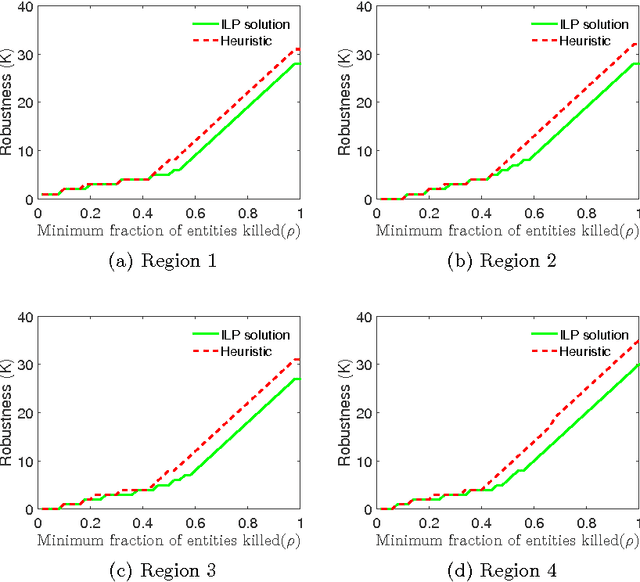
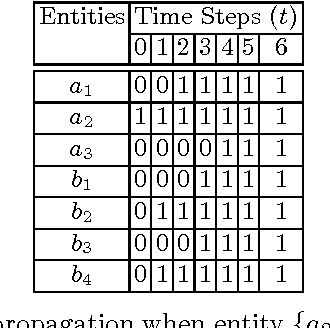
Critical Infrastructures like power and communication networks are highly interdependent on each other for their full functionality. Many significant research have been pursued to model the interdependency and failure analysis of these interdependent networks. However, most of these models fail to capture the complex interdependencies that might actually exist between the infrastructures. The \emph{Implicative Interdependency Model} that utilizes Boolean Logic to capture complex interdependencies was recently proposed which overcome the limitations of the existing models. A number of problems were studies based on this model. In this paper we study the \textit{Robustness} problem in Interdependent Power and Communication Network. The robustness is defined with respect to two parameters $K \in I^{+} \cup \{0\}$ and $\rho \in (0,1]$. We utilized the \emph{Implicative Interdependency Model} model to capture the complex interdependency between the two networks. The model classifies the interdependency relations into four cases. Computational complexity of the problem is analyzed for each of these cases. A polynomial time algorithm is designed for the first case that outputs the optimal solution. All the other cases are proved to be NP-complete. An in-approximability bound is provided for the third case. For the general case we formulate an Integer Linear Program to get the optimal solution and a polynomial time heuristic. The applicability of the heuristic is evaluated using power and communication network data of Maricopa County, Arizona. The experimental results showed that the heuristic almost always produced near optimal value of parameter $K$ for $\rho < 0.42$.