 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Cooperative Planning for Automated Vehicles with Hierarchical Monte Carlo Tree Search
Paper and Code
Jul 25, 2018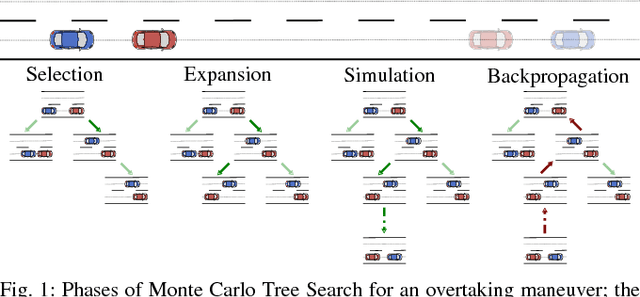
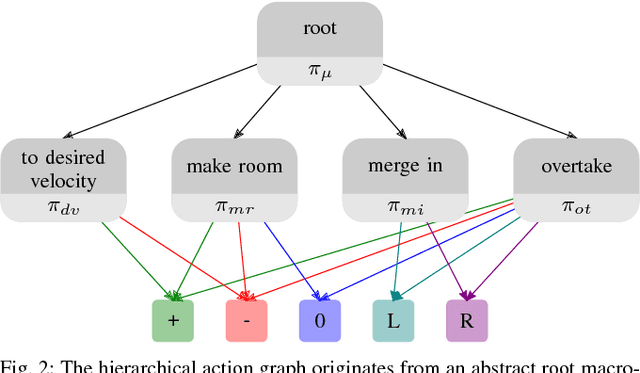
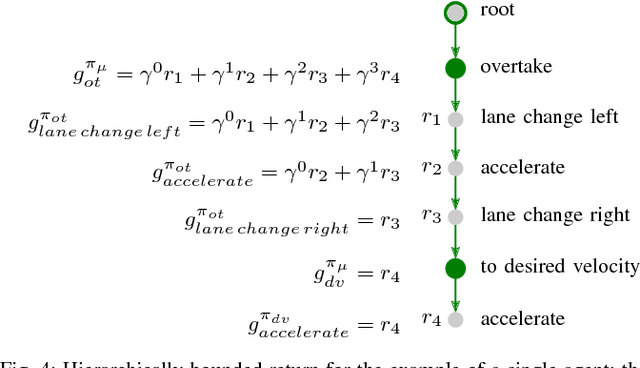
Today's automated vehicles lack the ability to cooperate implicitly with others. This work presents a Monte Carlo Tree Search (MCTS) based approach for decentralized cooperative planning using macro-actions for automated vehicles in heterogeneous environments. Based on cooperative modeling of other agents and Decoupled-UCT (a variant of MCTS), the algorithm evaluates the state-action-values of each agent in a cooperative and decentralized manner, explicitly modeling the interdependence of actions between traffic participants. Macro-actions allow for temporal extension over multiple time steps and increase the effective search depth requiring fewer iterations to plan over longer horizons. Without predefined policies for macro-actions, the algorithm simultaneously learns policies over and within macro-actions. The proposed method is evaluated under several conflict scenarios, showing that the algorithm can achieve effective cooperative planning with learned macro-actions in heterogeneous environments.