 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Based Page Creation for Improving E-Commerce Organic Search Traffic
Sep 25, 2022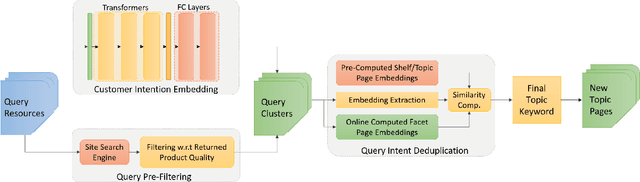


Organic search comprises a large portion of the total traffic for e-commerce companies. One approach to expand company's exposure on organic search channel lies on creating landing pages having broader coverage on customer intentions. In this paper, we present a transformer language model based organic channel page management system aiming at increasing prominence of the company's overall clicks on the channel. Our system successfully handles the creation and deployment process of millions of new landing pages. We show and discuss the real-world performances of state-of-the-art language representation learning method, and reveal how we find them as the production-optimal solutions.
Real-Time Trajectory Planning for Autonomous Driving with Gaussian Process and Incremental Refinement
May 24, 2022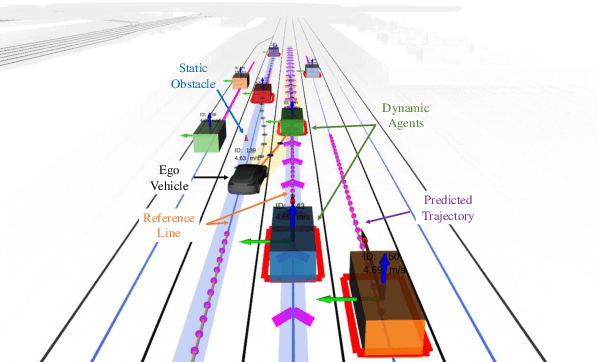
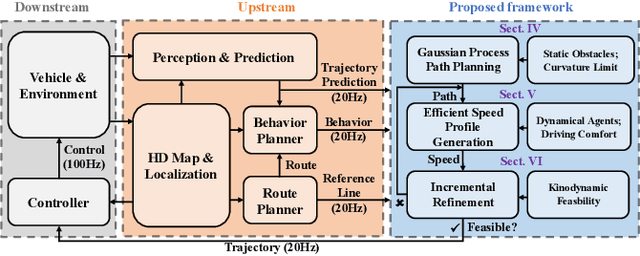
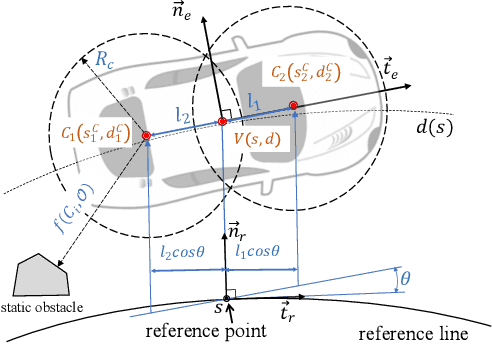
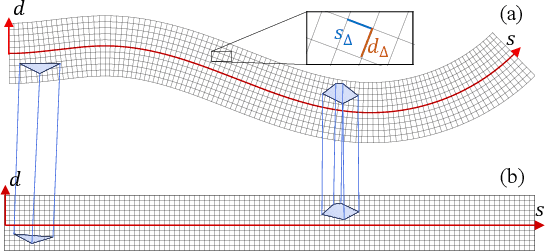
Real-time kinodynamic trajectory planning in dynamic environments is critical yet challenging for autonomous driving. In this letter, we propose an efficient trajectory planning system for autonomous driving in complex dynamic scenarios through iterative and incremental path-speed optimization. Exploiting the decoupled structure of the planning problem, a path planner based on Gaussian process first generates a continuous arc-length parameterized path in the Fren\'{e}t frame, considering static obstacle avoidance and curvature constraints. We theoretically prove that it is a good generalization of the well-known jerk optimal solution. An efficient s-t graph search method is introduced to find a speed profile along the generated path to deal with dynamic environments. Finally, the path and speed are optimized incrementally and iteratively to ensure kinodynamic feasibility. Various simulated scenarios with both static obstacles and dynamic agents verify the effectiveness and robustness of our proposed method. Experimental results show that our method can run at 20 Hz. The source code is released as an open-source package.
An Efficient Group-based Search Engine Marketing System for E-Commerce
Jul 17, 2021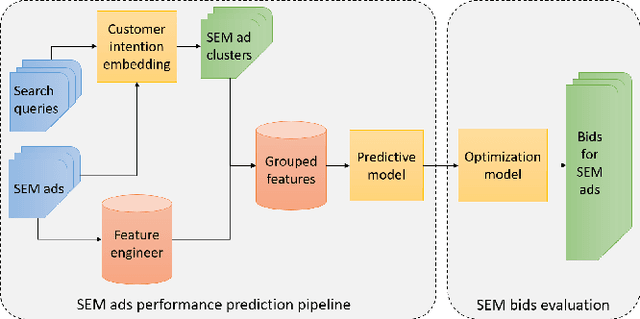
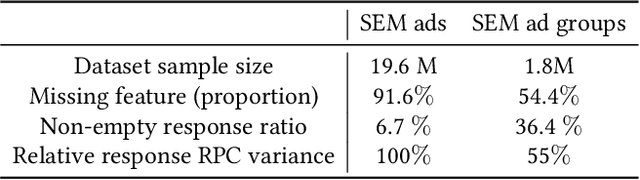
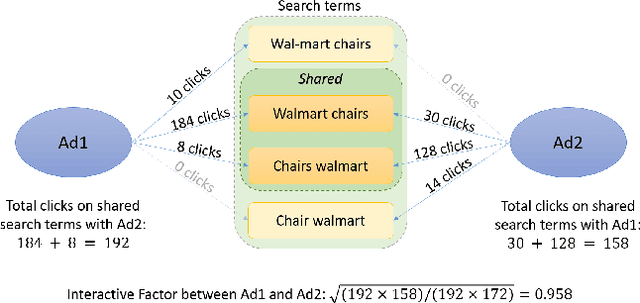

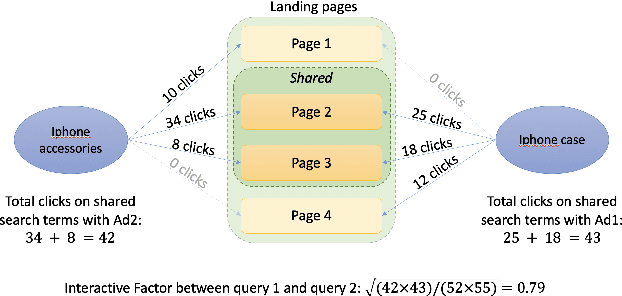
With the increasing scale of search engine marketing, designing an efficient bidding system is becoming paramount for the success of e-commerce companies. The critical challenges faced by a modern industrial-level bidding system include: 1. the catalog is enormous, and the relevant bidding features are of high sparsity; 2. the large volume of bidding requests induces significant computation burden to both the offline and online serving. Leveraging extraneous user-item information proves essential to mitigate the sparsity issue, for which we exploit the natural language signals from the users' query and the contextual knowledge from the products. In particular, we extract the vector representations of ads via the Transformer model and leverage their geometric relation to building collaborative bidding predictions via clustering. The two-step procedure also significantly reduces the computation stress of bid evaluation and optimization. In this paper, we introduce the end-to-end structure of the bidding system for search engine marketing for Walmart e-commerce, which successfully handles tens of millions of bids each day. We analyze the online and offline performances of our approach and discuss how we find it as a production-efficient solution.
Multi-Person Full Body Pose Estimation
Aug 23, 2020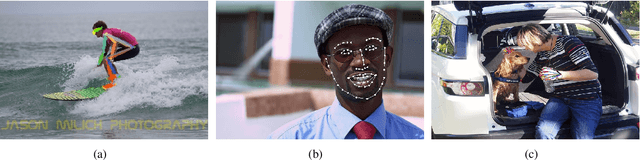


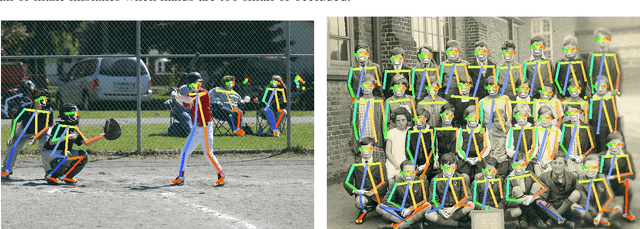
Multi-person pose estimation plays an important role in many fields. Although previous works have researched a lot on different parts of human pose estimation, full body pose estimation for multi-person still needs further research. Our work has developed an integrated model through knowledge distillation which can estimate full body poses. Trained based on the AlphaPose system and MSCOCO2017 dataset, our model achieves 51.5 mAP on the validation dataset annotated manually by ourselves. Related resources are available at https://esflfei.github.io/esflfei.gethub.io/website.html.
Cumulative Prospect Theory Meets Reinforcement Learning: Prediction and Control
Feb 26, 2016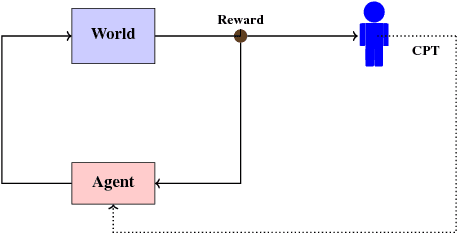
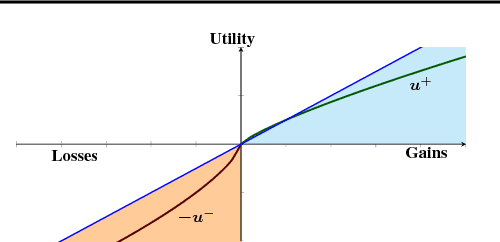
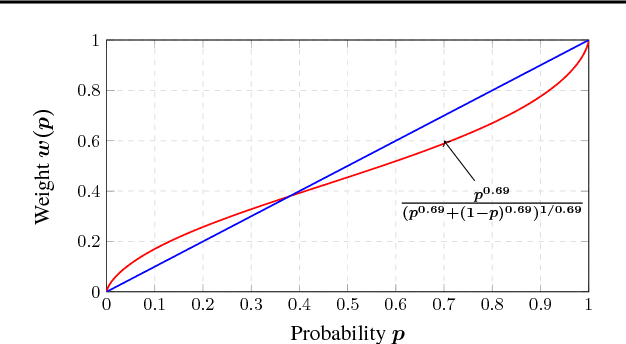
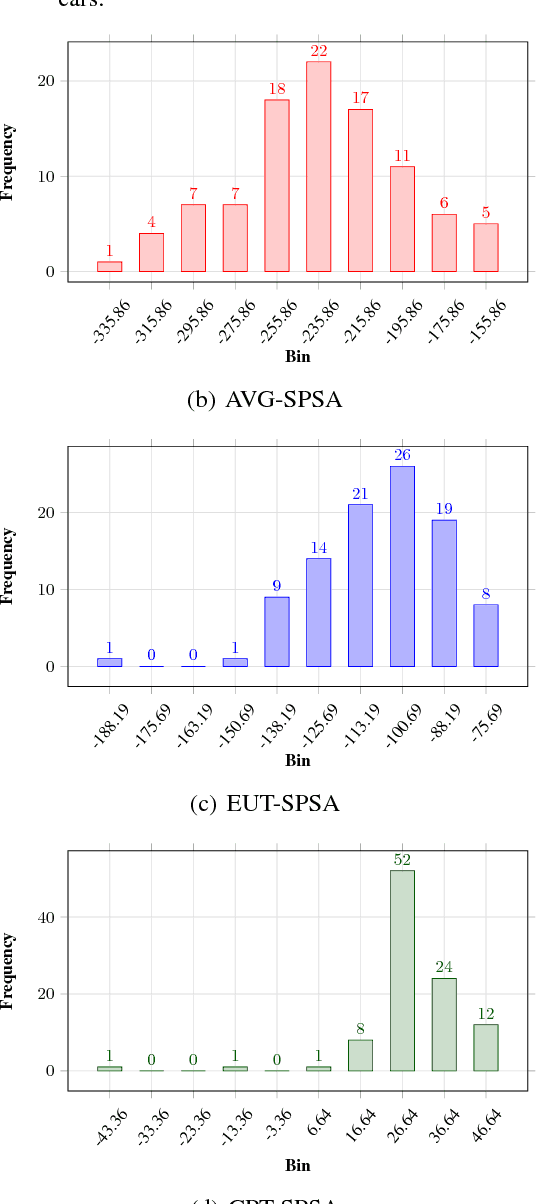
Cumulative prospect theory (CPT) is known to model human decisions well, with substantial empirical evidence supporting this claim. CPT works by distorting probabilities and is more general than the classic expected utility and coherent risk measures. We bring this idea to a risk-sensitive reinforcement learning (RL) setting and design algorithms for both estimation and control. The RL setting presents two particular challenges when CPT is applied: estimating the CPT objective requires estimations of the entire distribution of the value function and finding a randomized optimal policy. The estimation scheme that we propose uses the empirical distribution to estimate the CPT-value of a random variable. We then use this scheme in the inner loop of a CPT-value optimization procedure that is based on the well-known simulation optimization idea of simultaneous perturbation stochastic approximation (SPSA). We provide theoretical convergence guarantees for all the proposed algorithms and also illustrate the usefulness of CPT-based criteria in a traffic signal control application.