 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQA-TOOLBOX: Conversational Question-Answering for process task guidance in manufacturing
Dec 03, 2024



In this work we explore utilizing LLMs for data augmentation for manufacturing task guidance system. The dataset consists of representative samples of interactions with technicians working in an advanced manufacturing setting. The purpose of this work to explore the task, data augmentation for the supported tasks and evaluating the performance of the existing LLMs. We observe that that task is complex requiring understanding from procedure specification documents, actions and objects sequenced temporally. The dataset consists of 200,000+ question/answer pairs that refer to the spec document and are grounded in narrations and/or video demonstrations. We compared the performance of several popular open-sourced LLMs by developing a baseline using each LLM and then compared the responses in a reference-free setting using LLM-as-a-judge and compared the ratings with crowd-workers whilst validating the ratings with experts.
Human Comfortability Index Estimation in Industrial Human-Robot Collaboration Task
Aug 28, 2023



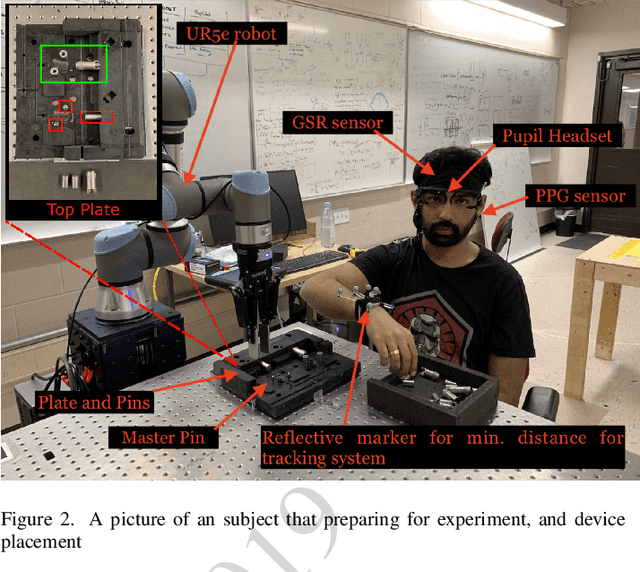
Fluent human-robot collaboration requires a robot teammate to understand, learn, and adapt to the human's psycho-physiological state. Such collaborations require a computing system that monitors human physiological signals during human-robot collaboration (HRC) to quantitatively estimate a human's level of comfort, which we have termed in this research as comfortability index (CI) and uncomfortability index (unCI). Subjective metrics (surprise, anxiety, boredom, calmness, and comfortability) and physiological signals were collected during a human-robot collaboration experiment that varied robot behavior. The emotion circumplex model is adapted to calculate the CI from the participant's quantitative data as well as physiological data. To estimate CI/unCI from physiological signals, time features were extracted from electrocardiogram (ECG), galvanic skin response (GSR), and pupillometry signals. In this research, we successfully adapt the circumplex model to find the location (axis) of 'comfortability' and 'uncomfortability' on the circumplex model, and its location match with the closest emotions on the circumplex model. Finally, the study showed that the proposed approach can estimate human comfortability/uncomfortability from physiological signals.
A Framework for Monitoring Human Physiological Response during Human Robot Collaborative Task
Jul 26, 2019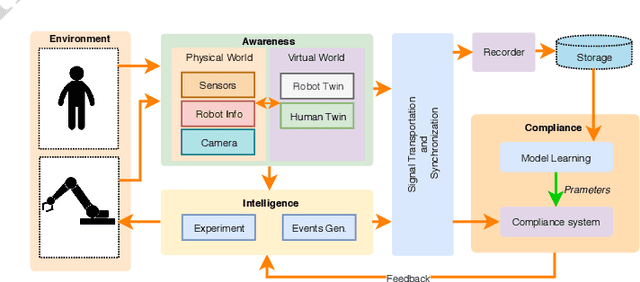
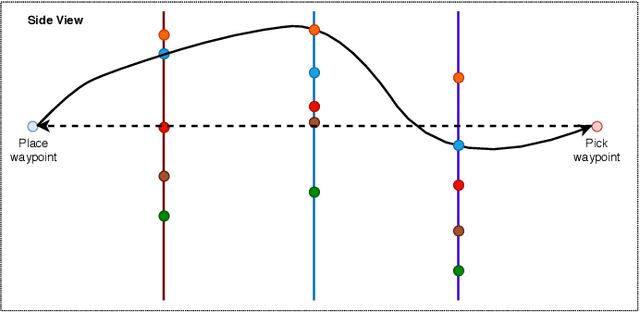
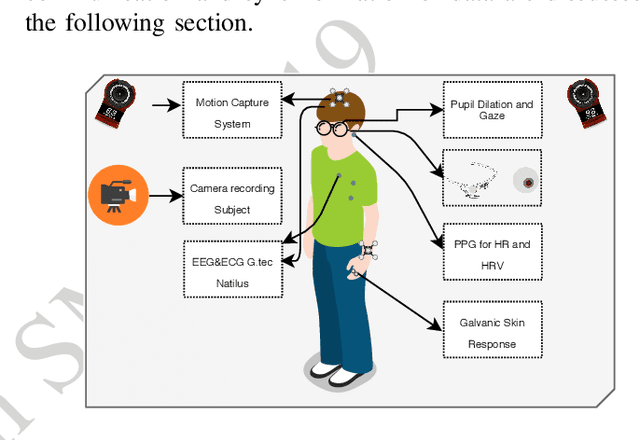
In this paper, a framework for monitoring human physiological response during Human-Robot Collaborative (HRC) task is presented. The framework highlights the importance of generation of event markers related to both human and robot, and also synchronization of data collected. This framework enables continuous data collection during an HRC task when changing robot movements as a form of stimuli to invoke a human physiological response. It also presents two case studies based on this framework and a data visualization tool for representation and easy analysis of the collected data during an HRC experiment.
HRC-SoS: Human Robot Collaboration Experimentation Platform as System of Systems
May 03, 2019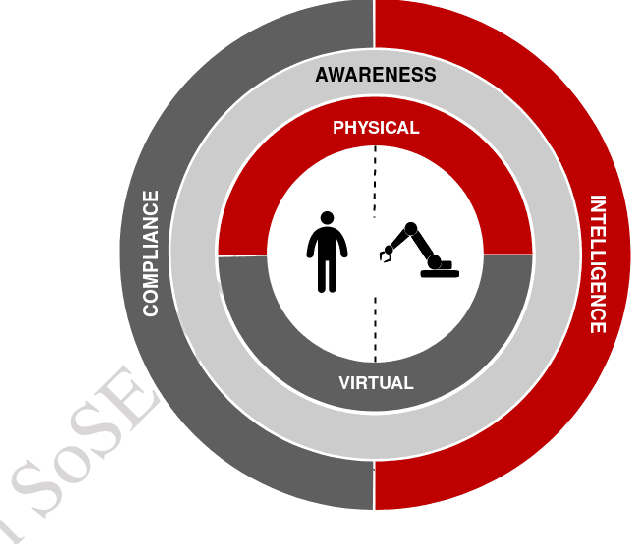

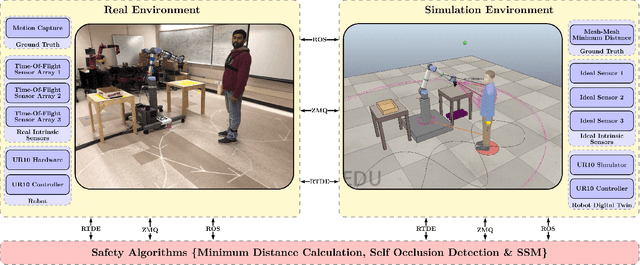
This paper presents an experimentation platform for human robot collaboration as a system of systems as well as proposes a conceptual framework describing the aspects of Human Robot Collaboration. These aspects are Awareness, Intelligence and Compliance of the system. Based on this framework case studies describing experiment setups performed using this platform are discussed. Each experiment highlights the use of the subsystems such as the digital twin, motion capture system, human-physiological monitoring system, data collection system and robot control and interface systems. A highlight of this paper showcases a subsystem with the ability to monitor human physiological feedback during a human robot collaboration task.