 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormulating Reinforcement Learning for Human-Robot Collaboration through Off-Policy Evaluation
Jan 27, 2026Reinforcement learning (RL) has the potential to transform real-world decision-making systems by enabling autonomous agents to learn from experience. Deploying RL in real-world settings, especially in the context of human-robot interaction, requires defining state representations and reward functions, which are critical for learning efficiency and policy performance. Traditional RL approaches often rely on domain expertise and trial-and-error, necessitating extensive human involvement as well as direct interaction with the environment, which can be costly and impractical, especially in complex and safety-critical applications. This work proposes a novel RL framework that leverages off-policy evaluation (OPE) for state space and reward function selection, using only logged interaction data. This approach eliminates the need for real-time access to the environment or human-in-the-loop feedback, greatly reducing the dependency on costly real-time interactions. The proposed approach systematically evaluates multiple candidate state representations and reward functions by training offline RL agents and applying OPE to estimate policy performance. The optimal state space and reward function are selected based on their ability to produce high-performing policies under OPE metrics. Our method is validated on two environments: the Lunar Lander environment by OpenAI Gym, which provides a controlled setting for assessing state space and reward function selection, and a NASA-MATB-II human subjects study environment, which evaluates the approach's real-world applicability to human-robot teaming scenarios. This work enhances the feasibility and scalability of offline RL for real-world environments by automating critical RL design decisions through a data-driven OPE-based evaluation, enabling more reliable, effective, and sustainable RL formulation for complex human-robot interaction settings.
Avoiding Death through Fear Intrinsic Conditioning
Jun 05, 2025



Biological and psychological concepts have inspired reinforcement learning algorithms to create new complex behaviors that expand agents' capacity. These behaviors can be seen in the rise of techniques like goal decomposition, curriculum, and intrinsic rewards, which have paved the way for these complex behaviors. One limitation in evaluating these methods is the requirement for engineered extrinsic for realistic environments. A central challenge in engineering the necessary reward function(s) comes from these environments containing states that carry high negative rewards, but provide no feedback to the agent. Death is one such stimuli that fails to provide direct feedback to the agent. In this work, we introduce an intrinsic reward function inspired by early amygdala development and produce this intrinsic reward through a novel memory-augmented neural network (MANN) architecture. We show how this intrinsic motivation serves to deter exploration of terminal states and results in avoidance behavior similar to fear conditioning observed in animals. Furthermore, we demonstrate how modifying a threshold where the fear response is active produces a range of behaviors that are described under the paradigm of general anxiety disorders (GADs). We demonstrate this behavior in the Miniworld Sidewalk environment, which provides a partially observable Markov decision process (POMDP) and a sparse reward with a non-descriptive terminal condition, i.e., death. In effect, this study results in a biologically-inspired neural architecture and framework for fear conditioning paradigms; we empirically demonstrate avoidance behavior in a constructed agent that is able to solve environments with non-descriptive terminal conditions.
Shuffle PatchMix Augmentation with Confidence-Margin Weighted Pseudo-Labels for Enhanced Source-Free Domain Adaptation
May 30, 2025This work investigates Source-Free Domain Adaptation (SFDA), where a model adapts to a target domain without access to source data. A new augmentation technique, Shuffle PatchMix (SPM), and a novel reweighting strategy are introduced to enhance performance. SPM shuffles and blends image patches to generate diverse and challenging augmentations, while the reweighting strategy prioritizes reliable pseudo-labels to mitigate label noise. These techniques are particularly effective on smaller datasets like PACS, where overfitting and pseudo-label noise pose greater risks. State-of-the-art results are achieved on three major benchmarks: PACS, VisDA-C, and DomainNet-126. Notably, on PACS, improvements of 7.3% (79.4% to 86.7%) and 7.2% are observed in single-target and multi-target settings, respectively, while gains of 2.8% and 0.7% are attained on DomainNet-126 and VisDA-C. This combination of advanced augmentation and robust pseudo-label reweighting establishes a new benchmark for SFDA. The code is available at: https://github.com/PrasannaPulakurthi/SPM
Convolutional Neural Network Compression via Dynamic Parameter Rank Pruning
Jan 15, 2024



While Convolutional Neural Networks (CNNs) excel at learning complex latent-space representations, their over-parameterization can lead to overfitting and reduced performance, particularly with limited data. This, alongside their high computational and memory demands, limits the applicability of CNNs for edge deployment. Low-rank matrix approximation has emerged as a promising approach to reduce CNN parameters, but its application presents challenges including rank selection and performance loss. To address these issues, we propose an efficient training method for CNN compression via dynamic parameter rank pruning. Our approach integrates efficient matrix factorization and novel regularization techniques, forming a robust framework for dynamic rank reduction and model compression. We use Singular Value Decomposition (SVD) to model low-rank convolutional filters and dense weight matrices and we achieve model compression by training the SVD factors with back-propagation in an end-to-end way. We evaluate our method on an array of modern CNNs, including ResNet-18, ResNet-20, and ResNet-32, and datasets like CIFAR-10, CIFAR-100, and ImageNet (2012), showcasing its applicability in computer vision. Our experiments show that the proposed method can yield substantial storage savings while maintaining or even enhancing classification performance.
Human Comfortability Index Estimation in Industrial Human-Robot Collaboration Task
Aug 28, 2023



Fluent human-robot collaboration requires a robot teammate to understand, learn, and adapt to the human's psycho-physiological state. Such collaborations require a computing system that monitors human physiological signals during human-robot collaboration (HRC) to quantitatively estimate a human's level of comfort, which we have termed in this research as comfortability index (CI) and uncomfortability index (unCI). Subjective metrics (surprise, anxiety, boredom, calmness, and comfortability) and physiological signals were collected during a human-robot collaboration experiment that varied robot behavior. The emotion circumplex model is adapted to calculate the CI from the participant's quantitative data as well as physiological data. To estimate CI/unCI from physiological signals, time features were extracted from electrocardiogram (ECG), galvanic skin response (GSR), and pupillometry signals. In this research, we successfully adapt the circumplex model to find the location (axis) of 'comfortability' and 'uncomfortability' on the circumplex model, and its location match with the closest emotions on the circumplex model. Finally, the study showed that the proposed approach can estimate human comfortability/uncomfortability from physiological signals.
SAHRTA: A Supervisory-Based Adaptive Human-Robot Teaming Architecture
Mar 12, 2020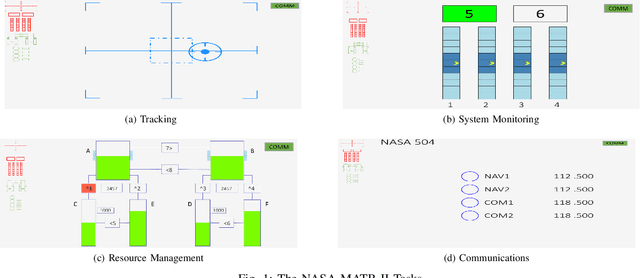
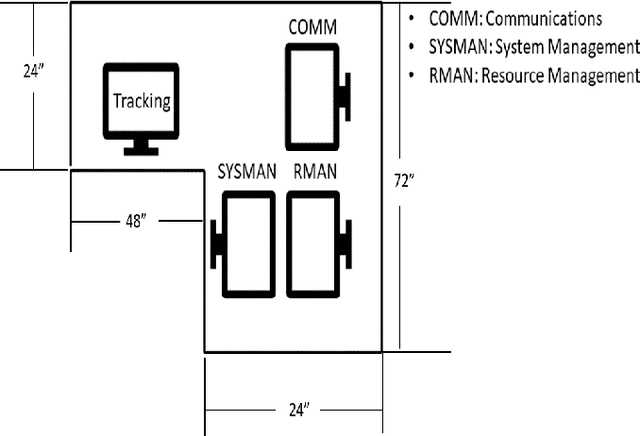
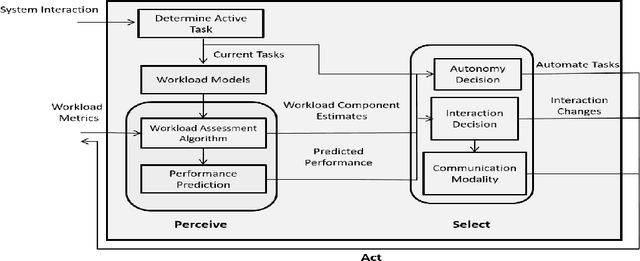
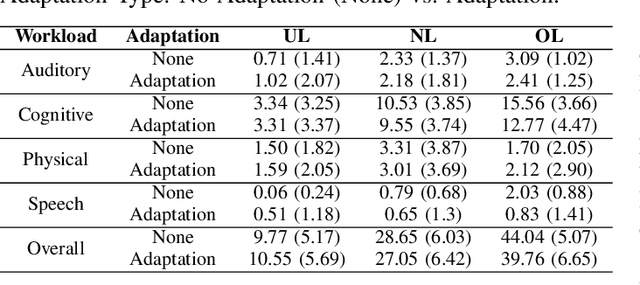
Supervisory-based human-robot teams are deployed in various dynamic and extreme environments (e.g., space exploration). Achieving high task performance in such environments is critical, as a mistake may lead to significant monetary loss or human injury. Task performance may be augmented by adapting the supervisory interface's interactions or autonomy levels based on the human supervisor's workload level, as workload is related to task performance. Typical adaptive systems rely solely on the human's overall or cognitive workload state to select what adaptation strategy to implement; however, overall workload encompasses many dimensions (i.e., cognitive, physical, visual, auditory, and speech) called workload components. Selecting an appropriate adaptation strategy based on a complete human workload state (rather than a single workload dimension) may allow for more impactful adaptations that ensure high task performance. A Supervisory-Based Adaptive Human-Robot Teaming Architecture (SAHRTA) that selects an appropriate level of autonomy or system interaction based on a complete real-time multi-dimensional workload estimate and predicted future task performance is introduced. SAHRTA was shown to improve overall task performance in a physically expanded version of the NASA Multi-Attribute Task Battery.