 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAHRTA: A Supervisory-Based Adaptive Human-Robot Teaming Architecture
Paper and Code
Mar 12, 2020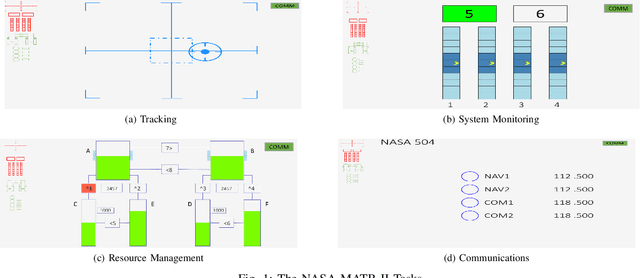
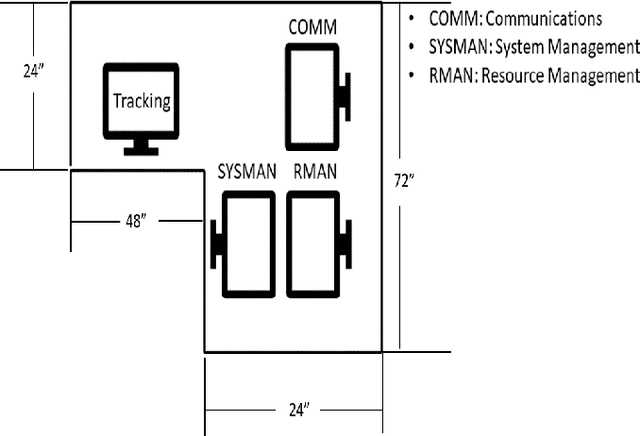
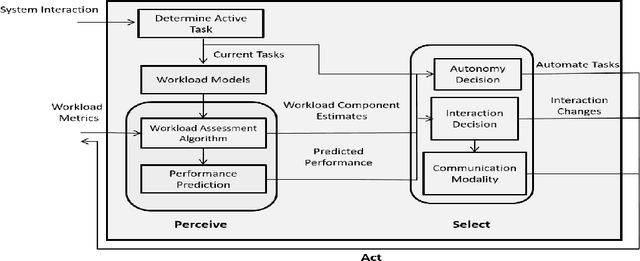
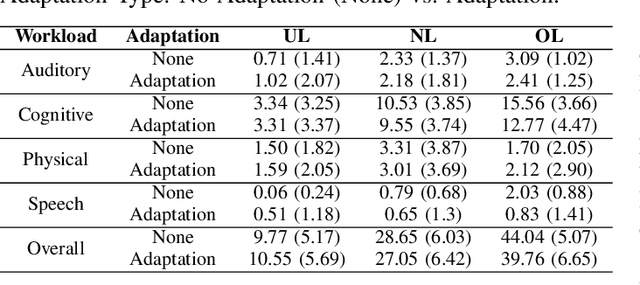
Supervisory-based human-robot teams are deployed in various dynamic and extreme environments (e.g., space exploration). Achieving high task performance in such environments is critical, as a mistake may lead to significant monetary loss or human injury. Task performance may be augmented by adapting the supervisory interface's interactions or autonomy levels based on the human supervisor's workload level, as workload is related to task performance. Typical adaptive systems rely solely on the human's overall or cognitive workload state to select what adaptation strategy to implement; however, overall workload encompasses many dimensions (i.e., cognitive, physical, visual, auditory, and speech) called workload components. Selecting an appropriate adaptation strategy based on a complete human workload state (rather than a single workload dimension) may allow for more impactful adaptations that ensure high task performance. A Supervisory-Based Adaptive Human-Robot Teaming Architecture (SAHRTA) that selects an appropriate level of autonomy or system interaction based on a complete real-time multi-dimensional workload estimate and predicted future task performance is introduced. SAHRTA was shown to improve overall task performance in a physically expanded version of the NASA Multi-Attribute Task Battery.