 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Workload Prediction: Lag Horizon Selection
May 21, 2025Human-robot teams must be aware of human workload when operating in uncertain, dynamic environments. Prior work employed physiological response metrics from wearable sensors to estimate the current human workload; however, these estimates only enable robots to respond to under- or overload conditions reactively. Current human workload prediction approaches are limited to short prediction horizons and fail to investigate variable lag horizons' impact on predictions. This letter investigates the impact of lag horizons on both univariate and multivariate time series forecasting models for human workload prediction. A key finding is that univariate predictions required longer lag horizons of 240 seconds (s), whereas multivariate workload predictions sufficed with shorter lag horizons with diminishing returns around 120s.
OSU-Wing PIC Phase I Evaluation: Baseline Workload and Situation Awareness Results
Nov 27, 2024



The common theory is that human pilot's performance degrades when responsible for an increased number of uncrewed aircraft systems (UAS). This theory was developed in the early 2010's for ground robots and not highly autonomous UAS. It has been shown that increasing autonomy can mitigate some performance impacts associated with increasing the number of UAS. Overall, the Oregon State University-Wing collaboration seeks to understand what factors negatively impact a pilot's ability to maintain responsibility and control over an assigned set of active UAS. The Phase I evaluation establishes baseline data focused on the number of UAS and the number of nests increase. This evaluation focuses on nominal operations as well as crewed aircraft encounters and adverse weather changes. The results demonstrate that the pilots were actively engaged and had very good situation awareness. Manipulation of the conditions did not result in any significant differences in overall workload. The overall results debunk the theory that increasing the number of UAS is detrimental to pilot's performance.
Workload Estimation for Unknown Tasks: A Survey of Machine Learning Under Distribution Shift
Mar 20, 2024Human-robot teams involve humans and robots collaborating to achieve tasks under various environmental conditions. Successful teaming will require robots to adapt autonomously to a human teammate's internal state. An important element of such adaptation is the ability to estimate the human teammates' workload in unknown situations. Existing workload models use machine learning to model the relationships between physiological metrics and workload; however, these methods are susceptible to individual differences and are heavily influenced by other factors. These methods cannot generalize to unknown tasks, as they rely on standard machine learning approaches that assume data consists of independent and identically distributed (IID) samples. This assumption does not necessarily hold for estimating workload for new tasks. A survey of non-IID machine learning techniques is presented, where commonly used techniques are evaluated using three criteria: portability, model complexity, and adaptability. These criteria are used to argue which techniques are most applicable for estimating workload for unknown tasks in dynamic, real-time environments.
GRAPE-S: Near Real-Time Coalition Formation for Multiple Service Collectives
Oct 19, 2023
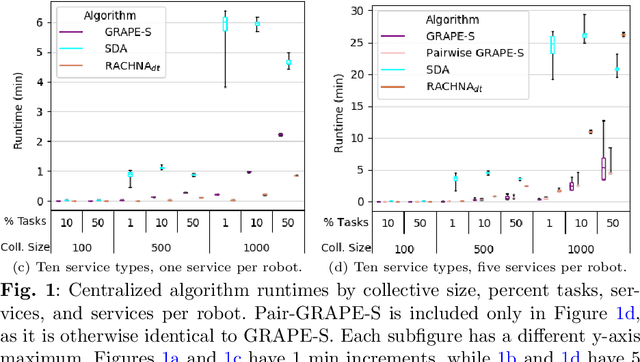
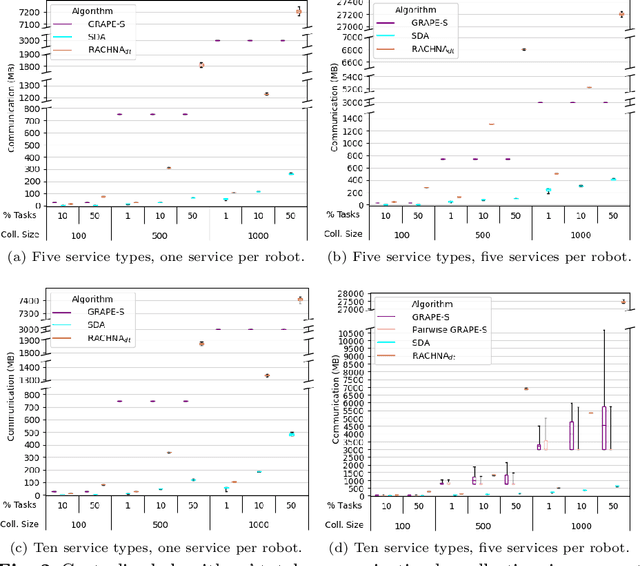
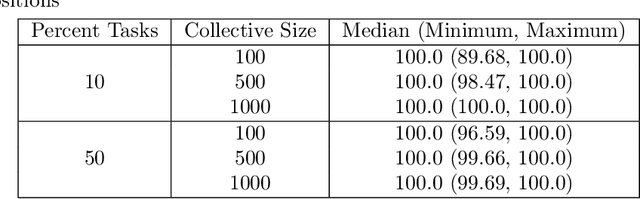
Robotic collectives for military and disaster response applications require coalition formation algorithms to partition robots into appropriate task teams. Collectives' missions will often incorporate tasks that require multiple high-level robot behaviors or services, which coalition formation must accommodate. The highly dynamic and unstructured application domains also necessitate that coalition formation algorithms produce near optimal solutions (i.e., >95% utility) in near real-time (i.e., <5 minutes) with very large collectives (i.e., hundreds of robots). No previous coalition formation algorithm satisfies these requirements. An initial evaluation found that traditional auction-based algorithms' runtimes are too long, even though the centralized simulator incorporated ideal conditions unlikely to occur in real-world deployments (i.e., synchronization across robots and perfect, instantaneous communication). The hedonic game-based GRAPE algorithm can produce solutions in near real-time, but cannot be applied to multiple service collectives. This manuscript integrates GRAPE and a services model, producing GRAPE-S and Pair-GRAPE-S. These algorithms and two auction baselines were evaluated using a centralized simulator with up to 1000 robots, and via the largest distributed coalition formation simulated evaluation to date, with up to 500 robots. The evaluations demonstrate that auctions transfer poorly to distributed collectives, resulting in excessive runtimes and low utility solutions. GRAPE-S satisfies the target domains' coalition formation requirements, producing near optimal solutions in near real-time, and Pair-GRAPE-S more than satisfies the domain requirements, producing optimal solutions in near real-time. GRAPE-S and Pair-GRAPE-S are the first algorithms demonstrated to support near real-time coalition formation for very large, distributed collectives with multiple services.
The $10 Million ANA Avatar XPRIZE Competition Advanced Immersive Telepresence Systems
Aug 15, 2023The $10M ANA Avatar XPRIZE aimed to create avatar systems that can transport human presence to remote locations in real time. The participants of this multi-year competition developed robotic systems that allow operators to see, hear, and interact with a remote environment in a way that feels as if they are truly there. On the other hand, people in the remote environment were given the impression that the operator was present inside the avatar robot. At the competition finals, held in November 2022 in Long Beach, CA, USA, the avatar systems were evaluated on their support for remotely interacting with humans, exploring new environments, and employing specialized skills. This article describes the competition stages with tasks and evaluation procedures, reports the results, presents the winning teams' approaches, and discusses lessons learned.
* Extended version of article accepted for competitions column
Can A Single Human Supervise A Swarm of 100 Heterogeneous Robots?
Jul 31, 2023
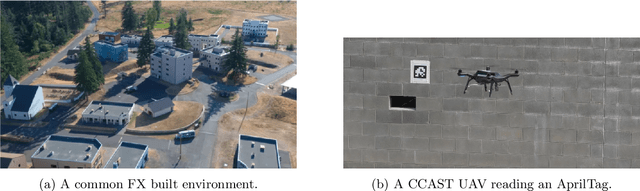
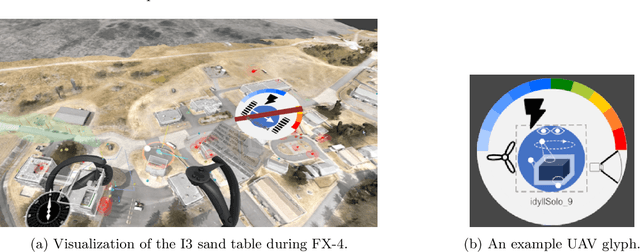

An open research question has been whether a single human can supervise a true heterogeneous swarm of robots completing tasks in real world environments. A general concern is whether or not the human's workload will be taxed to the breaking point. The Defense Advanced Research Projects Agency's OFFsensive Swarm-Enabled Tactics program's field exercises that occurred at U.S. Army urban training sites provided the opportunity to understand the impact of achieving such swarm deployments. The Command and Control of Aggregate Swarm Tactics integrator team's swarm commander users the heterogeneous robot swarm to conduct relevant missions. During the final OFFSET program field exercise, the team collected objective and subjective metrics related to teh swarm commander's human performance. A multi-dimensional workload algorithm that estimates overall workload based on five components of workload was used to analyze the results. While the swarm commander's workload estimate did cross the overload threshold frequently, the swarm commander was able to successfully complete the missions, often under challenging operational conditions. The presented results demonstrate that a single human can deploy a swarm of 100 heterogeneous robots to conduct real-world missions.
Congestion Analysis for the DARPA OFFSET CCAST Swarm
Jul 31, 2023The Defense Advanced Research Projects Agency (DARPA) OFFensive Swarm-Enabled Tactics program's goal of launching 250 unmanned aerial and ground vehicles from a limited sized launch zone was a daunting challenge. The swarm's aerial vehicles were primarily multirotor platforms, which can efficiently be launched en masse. Each field exercise expected the deployment of an even larger swarm. While the launch zone's spatial area increased with each field exercise, the relative space for each vehicle was not necessarily increased, considering the increasing size of the swarm and the vehicles' associated GPS error; however, safe mission deployment and execution were expected. At the same time, achieving the mission goals required maximizing efficiency of the swarm's performance by reducing congestion that blocked vehicles from completing tactic assignments. Congestion analysis conducted before the final field exercise focused on adjusting various constraints to optimize the swarm's deployment without reducing safety. During the field exercise, data was collected that permitted analyzing the number and durations of individual vehicle blockages' impact on the resulting congestion. After the field exercise, additional analyses used the mission plan to validate the use of simulation for analyzing congestion.
* 32 pages, 15 figures with multiple subfigures, Field Robotics Journal, published
The Viability of Domain Constrained Coalition Formation for Robotic Collectives
Jun 08, 2023Applications, such as military and disaster response, can benefit from robotic collectives' ability to perform multiple cooperative tasks (e.g., surveillance, damage assessments) efficiently across a large spatial area. Coalition formation algorithms can potentially facilitate collective robots' assignment to appropriate task teams; however, most coalition formation algorithms were designed for smaller multiple robot systems (i.e., 2-50 robots). Collectives' scale and domain-relevant constraints (i.e., distribution, near real-time, minimal communication) make coalition formation more challenging. This manuscript identifies the challenges inherent to designing coalition formation algorithms for very large collectives (e.g., 1000 robots). A survey of multiple robot coalition formation algorithms finds that most are unable to transfer directly to collectives, due to the identified system differences; however, auctions and hedonic games may be the most transferable. A simulation-based evaluation of three auction and hedonic game algorithms, applied to homogeneous and heterogeneous collectives, demonstrates that there are collective compositions for which no existing algorithm is viable; however, the experimental results and literature survey suggest paths forward.
SAHRTA: A Supervisory-Based Adaptive Human-Robot Teaming Architecture
Mar 12, 2020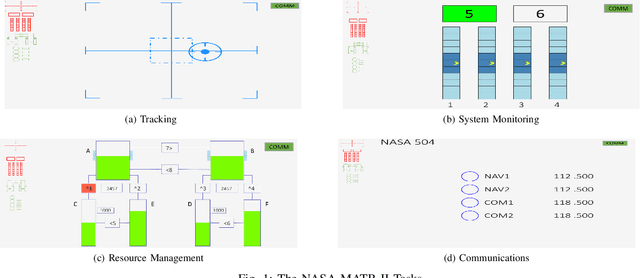
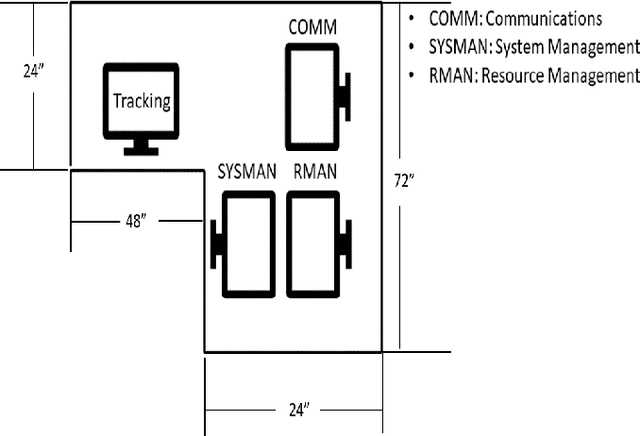
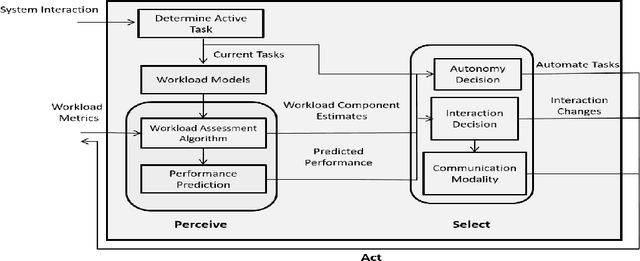
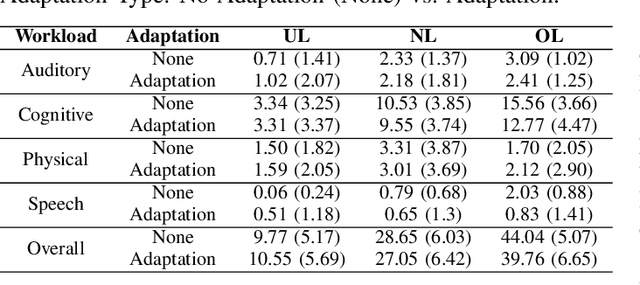
Supervisory-based human-robot teams are deployed in various dynamic and extreme environments (e.g., space exploration). Achieving high task performance in such environments is critical, as a mistake may lead to significant monetary loss or human injury. Task performance may be augmented by adapting the supervisory interface's interactions or autonomy levels based on the human supervisor's workload level, as workload is related to task performance. Typical adaptive systems rely solely on the human's overall or cognitive workload state to select what adaptation strategy to implement; however, overall workload encompasses many dimensions (i.e., cognitive, physical, visual, auditory, and speech) called workload components. Selecting an appropriate adaptation strategy based on a complete human workload state (rather than a single workload dimension) may allow for more impactful adaptations that ensure high task performance. A Supervisory-Based Adaptive Human-Robot Teaming Architecture (SAHRTA) that selects an appropriate level of autonomy or system interaction based on a complete real-time multi-dimensional workload estimate and predicted future task performance is introduced. SAHRTA was shown to improve overall task performance in a physically expanded version of the NASA Multi-Attribute Task Battery.
Communication Model-Task Pairing in Artificial Swarm Design
Jan 22, 2018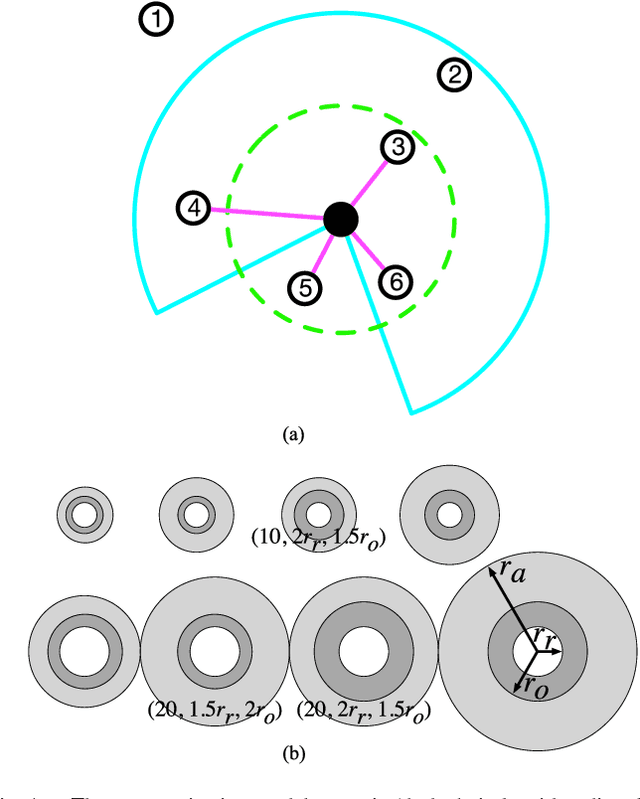
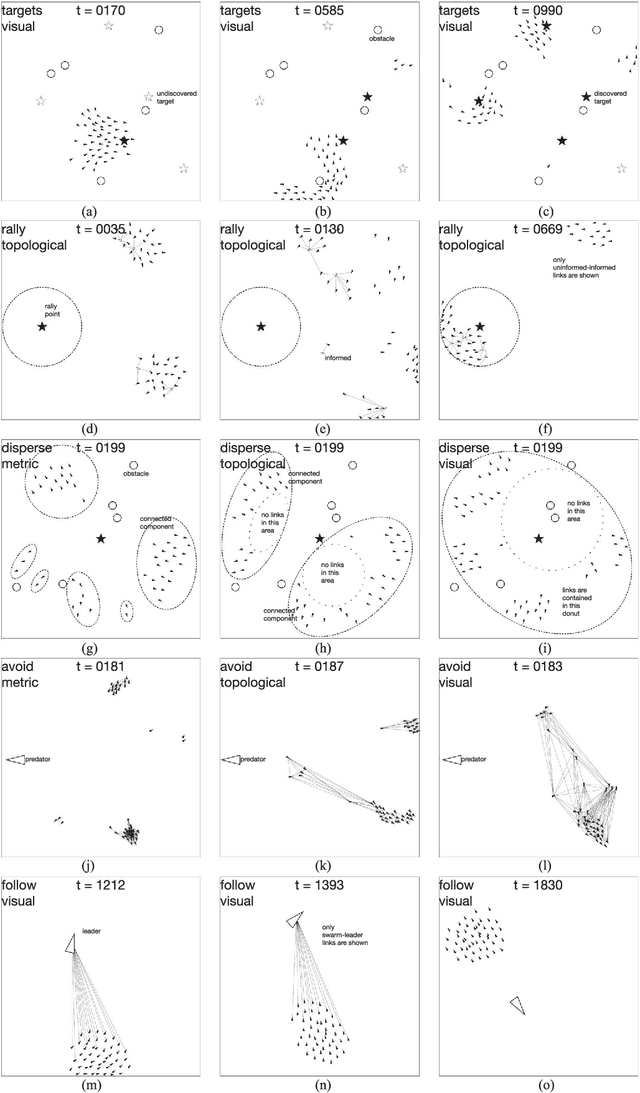
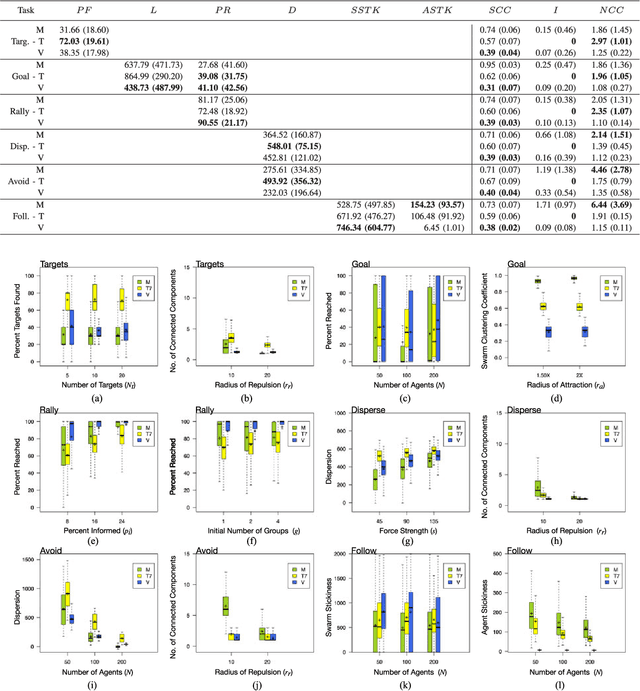
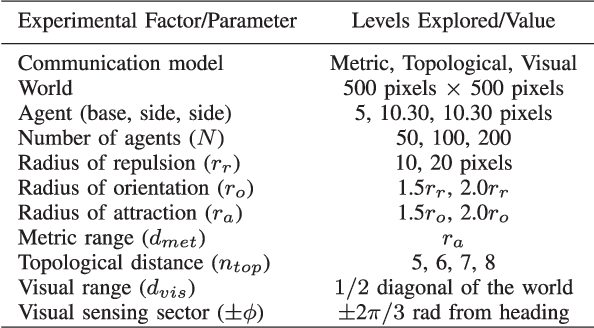
Unraveling the nature of the communication model that governs which two individuals in a swarm interact with each other is an important line of inquiry in the collective behavior sciences. A number of models have been proposed in the biological swarm literature, with the leading models being the metric, topological, and visual models. The hypothesis evaluated in this manuscript is whether the choice of a communication model impacts the performance of a tasked artificial swarm. The biological models are used to design coordination algorithms for a simulated swarm, which are evaluated over a range of six swarm robotics tasks. Each task has an associated set of performance metrics that are used to evaluate how the communication models fare against each other. The general findings demonstrate that the communication model significantly affects the swarm's performance for individual tasks, and this result implies that the communication model-task pairing is an important consideration when designing artificial swarms. Further analysis of each tasks' performance metrics reveal instances in which pairwise considerations of model and one of the various experimental factors becomes relevant. The reported research demonstrates that the artificial swarm's task performance can be increased through the careful selection of a communications model.