 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan A Single Human Supervise A Swarm of 100 Heterogeneous Robots?
Paper and Code
Jul 31, 2023
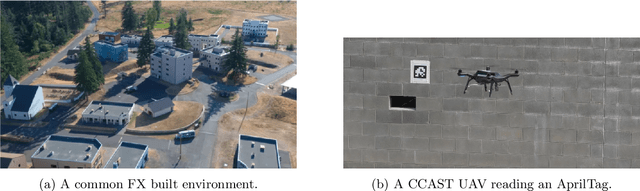
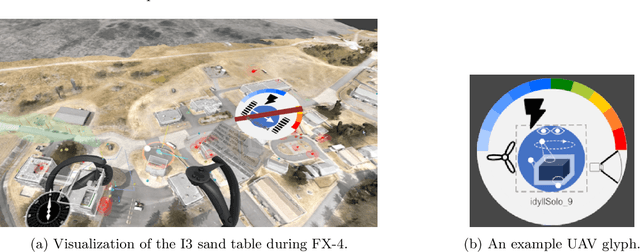

An open research question has been whether a single human can supervise a true heterogeneous swarm of robots completing tasks in real world environments. A general concern is whether or not the human's workload will be taxed to the breaking point. The Defense Advanced Research Projects Agency's OFFsensive Swarm-Enabled Tactics program's field exercises that occurred at U.S. Army urban training sites provided the opportunity to understand the impact of achieving such swarm deployments. The Command and Control of Aggregate Swarm Tactics integrator team's swarm commander users the heterogeneous robot swarm to conduct relevant missions. During the final OFFSET program field exercise, the team collected objective and subjective metrics related to teh swarm commander's human performance. A multi-dimensional workload algorithm that estimates overall workload based on five components of workload was used to analyze the results. While the swarm commander's workload estimate did cross the overload threshold frequently, the swarm commander was able to successfully complete the missions, often under challenging operational conditions. The presented results demonstrate that a single human can deploy a swarm of 100 heterogeneous robots to conduct real-world missions.