 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSU-Wing PIC Phase I Evaluation: Baseline Workload and Situation Awareness Results
Nov 27, 2024



The common theory is that human pilot's performance degrades when responsible for an increased number of uncrewed aircraft systems (UAS). This theory was developed in the early 2010's for ground robots and not highly autonomous UAS. It has been shown that increasing autonomy can mitigate some performance impacts associated with increasing the number of UAS. Overall, the Oregon State University-Wing collaboration seeks to understand what factors negatively impact a pilot's ability to maintain responsibility and control over an assigned set of active UAS. The Phase I evaluation establishes baseline data focused on the number of UAS and the number of nests increase. This evaluation focuses on nominal operations as well as crewed aircraft encounters and adverse weather changes. The results demonstrate that the pilots were actively engaged and had very good situation awareness. Manipulation of the conditions did not result in any significant differences in overall workload. The overall results debunk the theory that increasing the number of UAS is detrimental to pilot's performance.
Exploring Consequential Robot Sound: Should We Make Robots Quiet and Kawaii-et?
Apr 05, 2021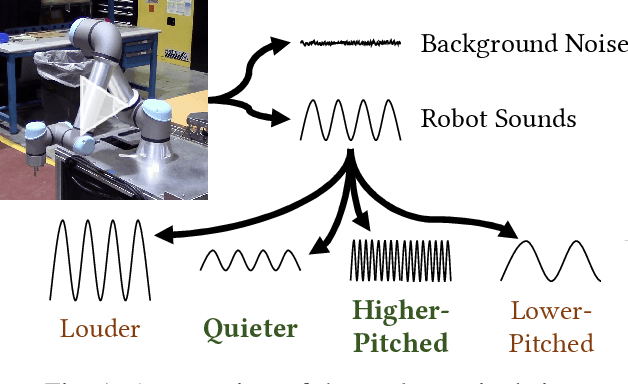
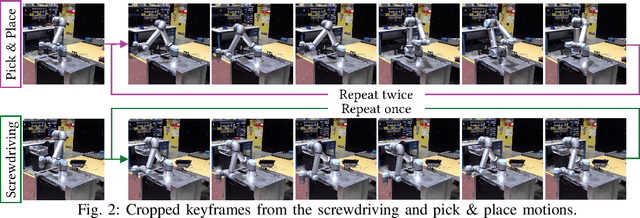
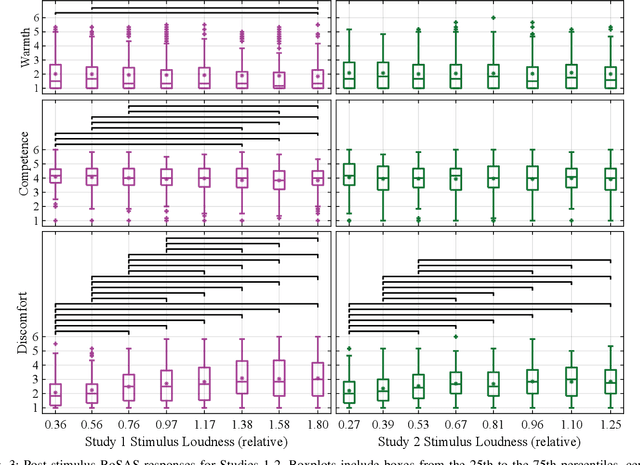
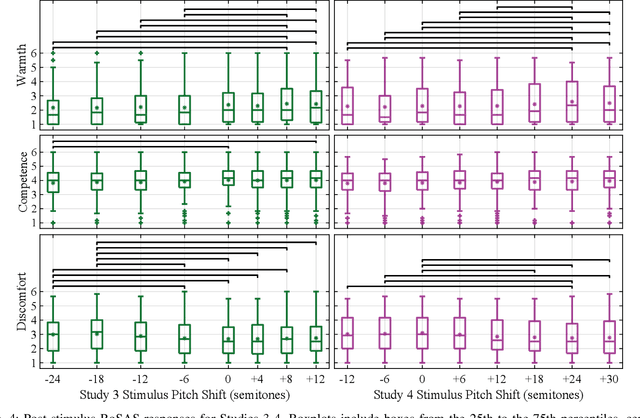
All robots create consequential sound -- sound produced as a result of the robot's mechanisms -- yet little work has explored how sound impacts human-robot interaction. Recent work shows that the sound of different robot mechanisms affects perceived competence, trust, human-likeness, and discomfort. However, the physical sound characteristics responsible for these perceptions have not been clearly identified. In this paper, we aim to explore key characteristics of robot sound that might influence perceptions. A pilot study from our past work showed that quieter and higher-pitched robots may be perceived as more competent and less discomforting. To better understand how variance in these attributes affects perception, we performed audio manipulations on two sets of industrial robot arm videos within a series of four new studies presented in this paper. Results confirmed that quieter robots were perceived as less discomforting. In addition, higher-pitched robots were perceived as more energetic, happy, warm, and competent. Despite the robot's industrial purpose and appearance, participants seemed to prefer more "cute" (or "kawaii") sound profiles, which could have implications for the design of more acceptable and fulfilling sound profiles for human-robot interactions with practical collaborative robots.