 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSU-Wing PIC Phase I Evaluation: Baseline Workload and Situation Awareness Results
Nov 27, 2024



The common theory is that human pilot's performance degrades when responsible for an increased number of uncrewed aircraft systems (UAS). This theory was developed in the early 2010's for ground robots and not highly autonomous UAS. It has been shown that increasing autonomy can mitigate some performance impacts associated with increasing the number of UAS. Overall, the Oregon State University-Wing collaboration seeks to understand what factors negatively impact a pilot's ability to maintain responsibility and control over an assigned set of active UAS. The Phase I evaluation establishes baseline data focused on the number of UAS and the number of nests increase. This evaluation focuses on nominal operations as well as crewed aircraft encounters and adverse weather changes. The results demonstrate that the pilots were actively engaged and had very good situation awareness. Manipulation of the conditions did not result in any significant differences in overall workload. The overall results debunk the theory that increasing the number of UAS is detrimental to pilot's performance.
Concurrent Constrained Optimization of Unknown Rewards for Multi-Robot Task Allocation
May 24, 2023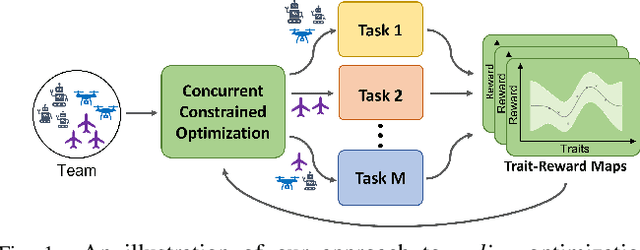
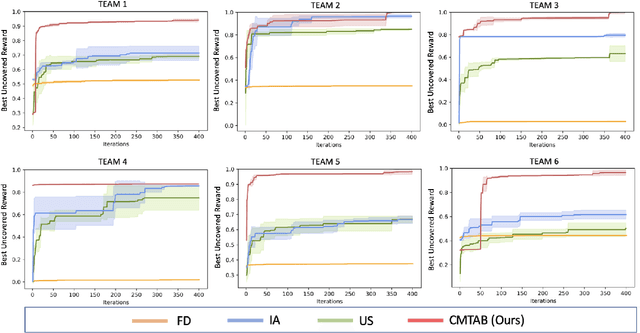
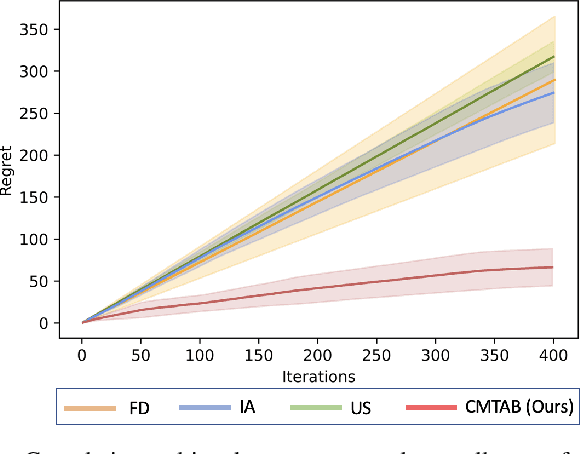
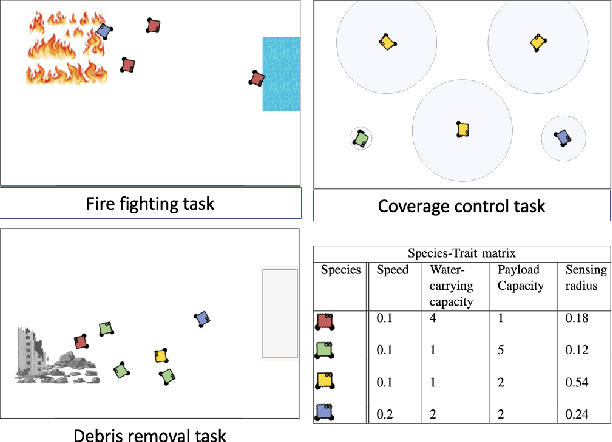
Task allocation can enable effective coordination of multi-robot teams to accomplish tasks that are intractable for individual robots. However, existing approaches to task allocation often assume that task requirements or reward functions are known and explicitly specified by the user. In this work, we consider the challenge of forming effective coalitions for a given heterogeneous multi-robot team when task reward functions are unknown. To this end, we first formulate a new class of problems, dubbed COncurrent Constrained Online optimization of Allocation (COCOA). The COCOA problem requires online optimization of coalitions such that the unknown rewards of all the tasks are simultaneously maximized using a given multi-robot team with constrained resources. To address the COCOA problem, we introduce an online optimization algorithm, named Concurrent Multi-Task Adaptive Bandits (CMTAB), that leverages and builds upon continuum-armed bandit algorithms. Experiments involving detailed numerical simulations and a simulated emergency response task reveal that CMTAB can effectively trade-off exploration and exploitation to simultaneously and efficiently optimize the unknown task rewards while respecting the team's resource constraints.
Inferring Implicit Trait Preferences for Task Allocation in Heterogeneous Teams
Feb 21, 2023Task allocation in heterogeneous multi-agent teams often requires reasoning about multi-dimensional agent traits (i.e., capabilities) and the demands placed on them by tasks. However, existing methods tend to ignore the fact that not all traits equally contribute to a given task. Ignoring such inherent preferences or relative importance can lead to unintended sub-optimal allocations of limited agent resources that do not necessarily contribute to task success. Further, reasoning over a large number of traits can incur a hefty computational burden. To alleviate these concerns, we propose an algorithm to infer task-specific trait preferences implicit in expert demonstrations. We leverage the insight that the consistency with which an expert allocates a trait to a task across demonstrations reflects the trait's importance to that task. Inspired by findings in psychology, we account for the fact that the inherent diversity of a trait in the dataset influences the dataset's informativeness and, thereby, the extent of the inferred preference or the lack thereof. Through detailed numerical simulations and evaluations of a publicly-available soccer dataset (FIFA 20), we demonstrate that we can successfully infer implicit trait preferences and that accounting for the inferred preferences leads to more computationally efficient and effective task allocation, compared to a baseline approach that treats all traits equally.