 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of Concept Explanations Should be Uncertainty Aware
Dec 13, 2023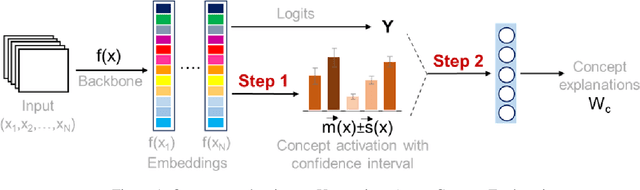
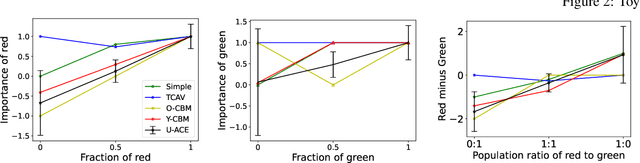
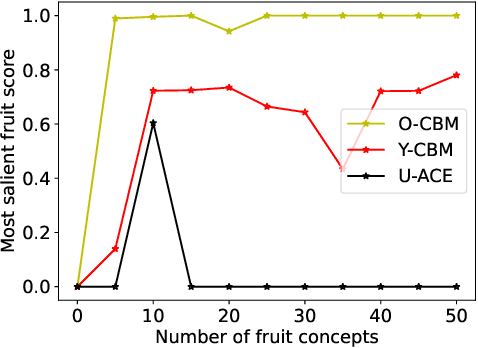

Model explanations are very valuable for interpreting and debugging prediction models. We study a specific kind of global explanations called Concept Explanations, where the goal is to interpret a model using human-understandable concepts. Recent advances in multi-modal learning rekindled interest in concept explanations and led to several label-efficient proposals for estimation. However, existing estimation methods are unstable to the choice of concepts or dataset that is used for computing explanations. We observe that instability in explanations is due to high variance in point estimation of importance scores. We propose an uncertainty aware Bayesian estimation method, which readily improved reliability of the concept explanations. We demonstrate with theoretical analysis and empirical evaluation that explanations computed by our method are more reliable while also being label-efficient and faithful.
Tanimoto Random Features for Scalable Molecular Machine Learning
Jun 26, 2023The Tanimoto coefficient is commonly used to measure the similarity between molecules represented as discrete fingerprints, either as a distance metric or a positive definite kernel. While many kernel methods can be accelerated using random feature approximations, at present there is a lack of such approximations for the Tanimoto kernel. In this paper we propose two kinds of novel random features to allow this kernel to scale to large datasets, and in the process discover a novel extension of the kernel to real vectors. We theoretically characterize these random features, and provide error bounds on the spectral norm of the Gram matrix. Experimentally, we show that the random features proposed in this work are effective at approximating the Tanimoto coefficient in real-world datasets and that the kernels explored in this work are useful for molecular property prediction and optimization tasks.
Concurrent Constrained Optimization of Unknown Rewards for Multi-Robot Task Allocation
May 24, 2023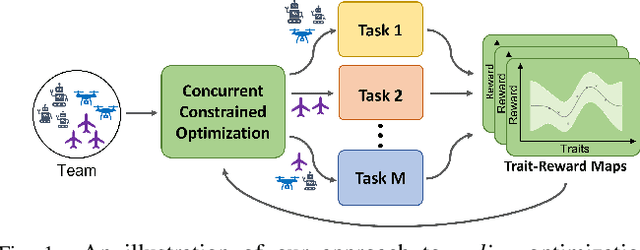
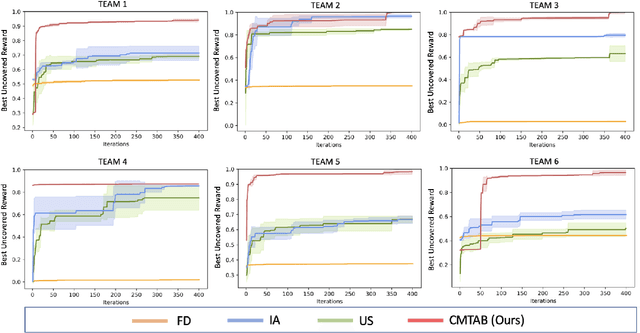
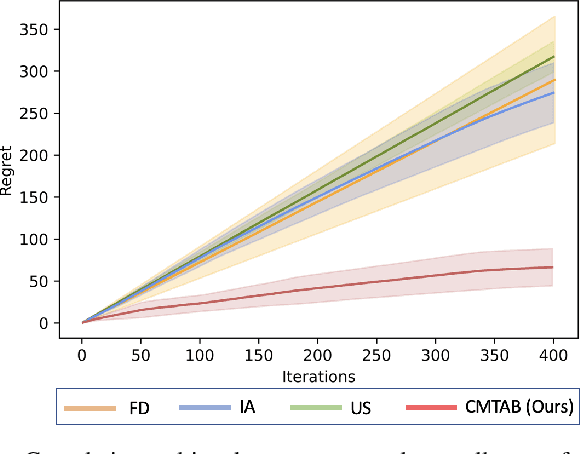
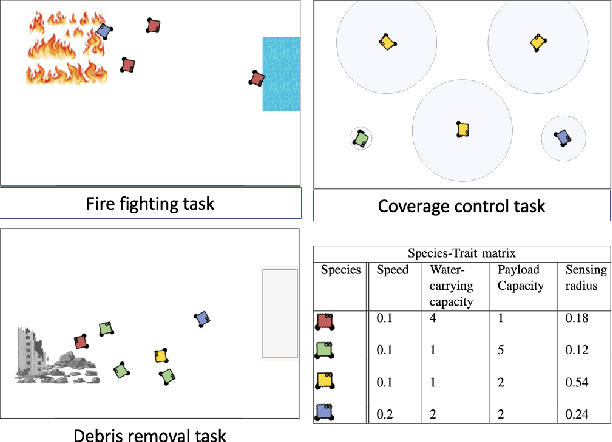
Task allocation can enable effective coordination of multi-robot teams to accomplish tasks that are intractable for individual robots. However, existing approaches to task allocation often assume that task requirements or reward functions are known and explicitly specified by the user. In this work, we consider the challenge of forming effective coalitions for a given heterogeneous multi-robot team when task reward functions are unknown. To this end, we first formulate a new class of problems, dubbed COncurrent Constrained Online optimization of Allocation (COCOA). The COCOA problem requires online optimization of coalitions such that the unknown rewards of all the tasks are simultaneously maximized using a given multi-robot team with constrained resources. To address the COCOA problem, we introduce an online optimization algorithm, named Concurrent Multi-Task Adaptive Bandits (CMTAB), that leverages and builds upon continuum-armed bandit algorithms. Experiments involving detailed numerical simulations and a simulated emergency response task reveal that CMTAB can effectively trade-off exploration and exploitation to simultaneously and efficiently optimize the unknown task rewards while respecting the team's resource constraints.