 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOh F**k! How Do People Feel about Robots that Leverage Profanity?
May 09, 2025Profanity is nearly as old as language itself, and cursing has become particularly ubiquitous within the last century. At the same time, robots in personal and service applications are often overly polite, even though past work demonstrates the potential benefits of robot norm-breaking. Thus, we became curious about robots using curse words in error scenarios as a means for improving social perceptions by human users. We investigated this idea using three phases of exploratory work: an online video-based study (N = 76) with a student pool, an online video-based study (N = 98) in the general U.S. population, and an in-person proof-of-concept deployment (N = 52) in a campus space, each of which included the following conditions: no-speech, non-expletive error response, and expletive error response. A surprising result in the outcomes for all three studies was that although verbal acknowledgment of an error was typically beneficial (as expected based on prior work), few significant differences appeared between the non-expletive and expletive error acknowledgment conditions (counter to our expectations). Within the cultural context of our work, the U.S., it seems that many users would likely not mind if robots curse, and may even find it relatable and humorous. This work signals a promising and mischievous design space that challenges typical robot character design.
Exploring Consequential Robot Sound: Should We Make Robots Quiet and Kawaii-et?
Apr 05, 2021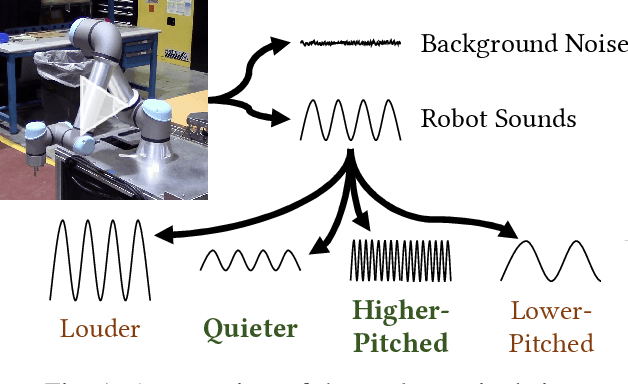
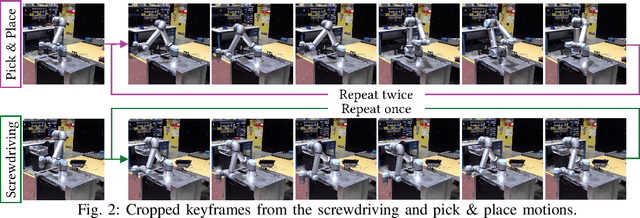
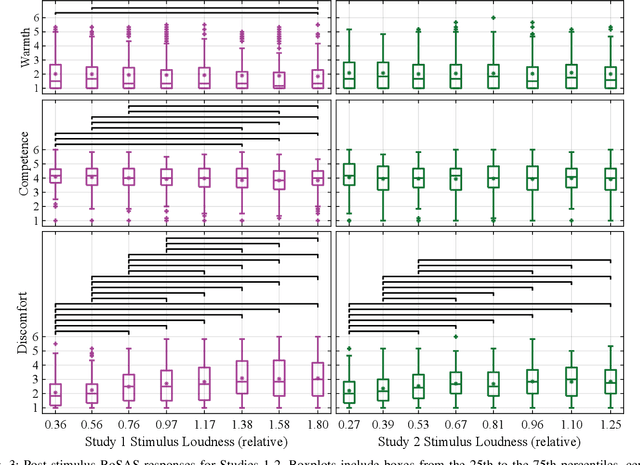
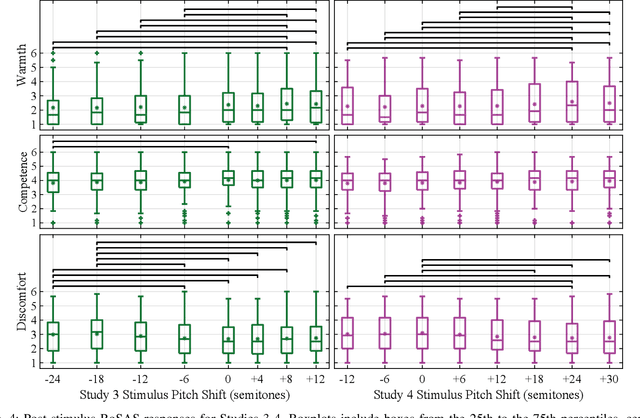
All robots create consequential sound -- sound produced as a result of the robot's mechanisms -- yet little work has explored how sound impacts human-robot interaction. Recent work shows that the sound of different robot mechanisms affects perceived competence, trust, human-likeness, and discomfort. However, the physical sound characteristics responsible for these perceptions have not been clearly identified. In this paper, we aim to explore key characteristics of robot sound that might influence perceptions. A pilot study from our past work showed that quieter and higher-pitched robots may be perceived as more competent and less discomforting. To better understand how variance in these attributes affects perception, we performed audio manipulations on two sets of industrial robot arm videos within a series of four new studies presented in this paper. Results confirmed that quieter robots were perceived as less discomforting. In addition, higher-pitched robots were perceived as more energetic, happy, warm, and competent. Despite the robot's industrial purpose and appearance, participants seemed to prefer more "cute" (or "kawaii") sound profiles, which could have implications for the design of more acceptable and fulfilling sound profiles for human-robot interactions with practical collaborative robots.