 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCyber-Physical Testbed for Human-Robot Collaborative Task Planning and Execution
May 30, 2019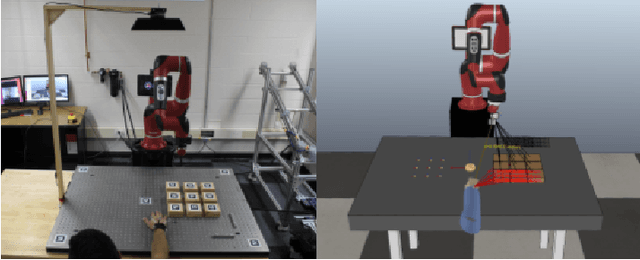
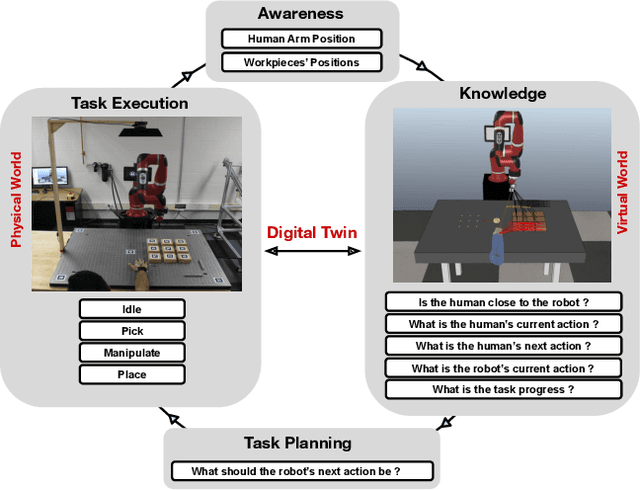
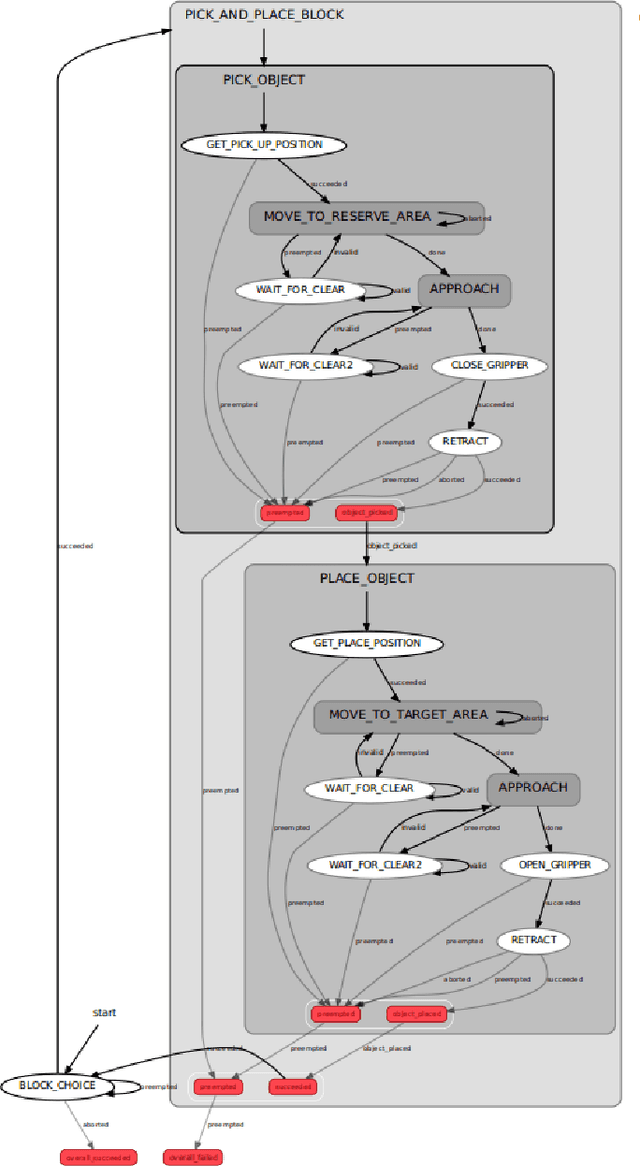
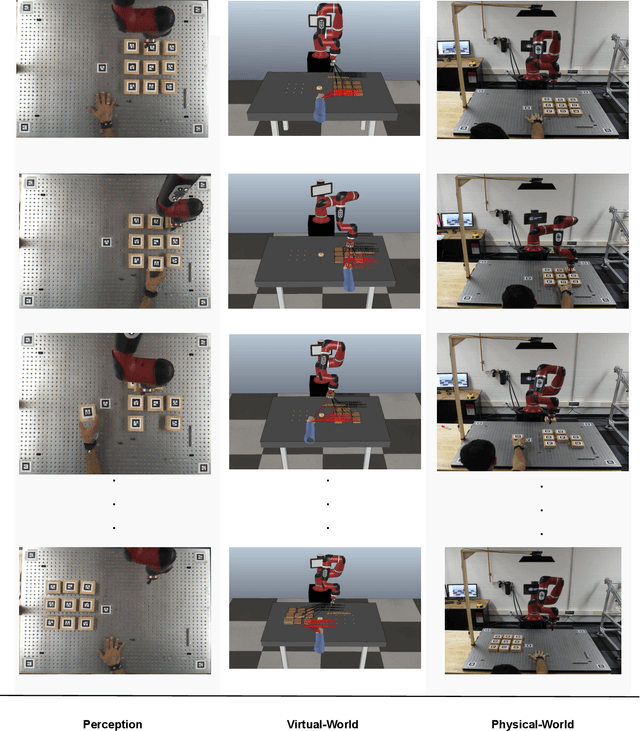
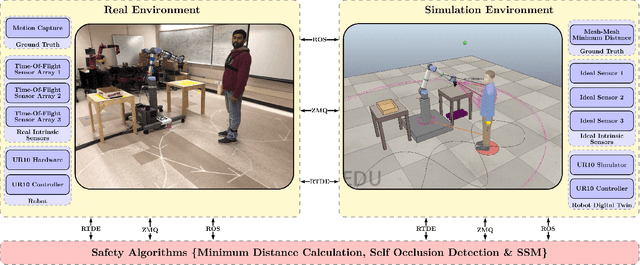
In this paper, we present a cyber-physical testbed created to enable a human-robot team to perform a shared task in a shared workspace. The testbed is suitable for the implementation of a tabletop manipulation task, a common human-robot collaboration scenario. The testbed integrates elements that exist in the physical and virtual world. In this work, we report the insights we gathered throughout our exploration in understanding and implementing task planning and execution for human-robot team.
HRC-SoS: Human Robot Collaboration Experimentation Platform as System of Systems
May 03, 2019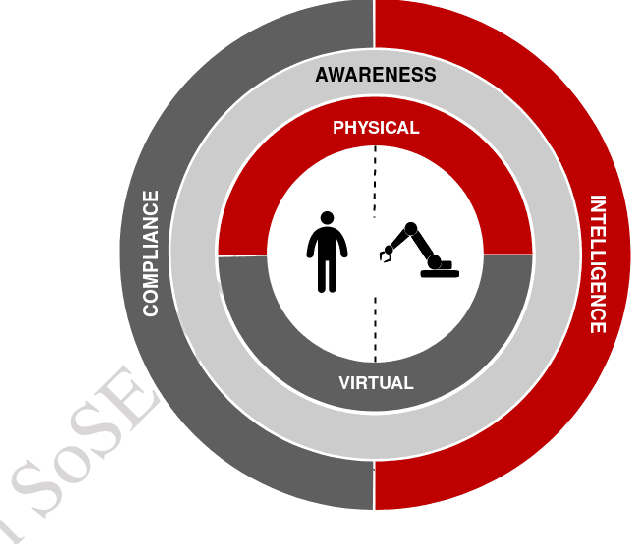

This paper presents an experimentation platform for human robot collaboration as a system of systems as well as proposes a conceptual framework describing the aspects of Human Robot Collaboration. These aspects are Awareness, Intelligence and Compliance of the system. Based on this framework case studies describing experiment setups performed using this platform are discussed. Each experiment highlights the use of the subsystems such as the digital twin, motion capture system, human-physiological monitoring system, data collection system and robot control and interface systems. A highlight of this paper showcases a subsystem with the ability to monitor human physiological feedback during a human robot collaboration task.