Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCyber-Physical Testbed for Human-Robot Collaborative Task Planning and Execution
Paper and Code
May 30, 2019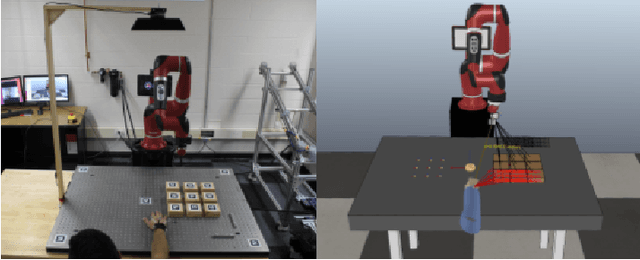
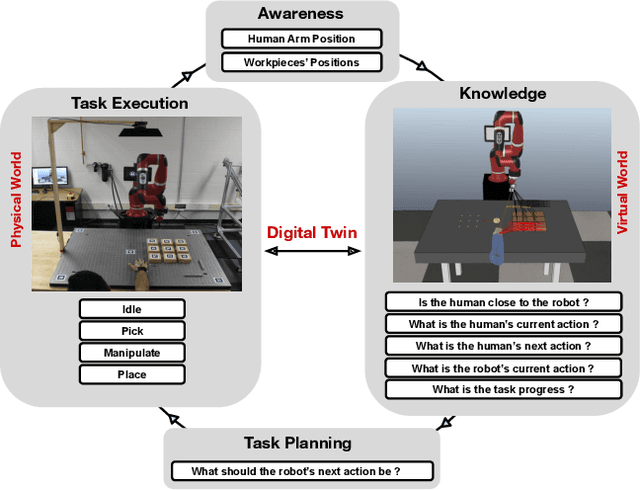
In this paper, we present a cyber-physical testbed created to enable a human-robot team to perform a shared task in a shared workspace. The testbed is suitable for the implementation of a tabletop manipulation task, a common human-robot collaboration scenario. The testbed integrates elements that exist in the physical and virtual world. In this work, we report the insights we gathered throughout our exploration in understanding and implementing task planning and execution for human-robot team.
* (Draft V1)Submitted to Systems Man and Cybernetics SMC 2019 Corrected
typos
View paper on