 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Representation of Neural Networks Architectures
Dec 22, 2025In this paper we consider the limiting case of neural networks (NNs) architectures when the number of neurons in each hidden layer and the number of hidden layers tend to infinity thus forming a continuum, and we derive approximation errors as a function of the number of neurons and/or hidden layers. Firstly, we consider the case of neural networks with a single hidden layer and we derive an integral infinite width neural representation that generalizes existing continuous neural networks (CNNs) representations. Then we extend this to deep residual CNNs that have a finite number of integral hidden layers and residual connections. Secondly, we revisit the relation between neural ODEs and deep residual NNs and we formalize approximation errors via discretization techniques. Then, we merge these two approaches into a unified homogeneous representation of NNs as a Distributed Parameter neural Network (DiPaNet) and we show that most of the existing finite and infinite-dimensional NNs architectures are related via homogenization/discretization with the DiPaNet representation. Our approach is purely deterministic and applies to general, uniformly continuous matrix weight functions. Relations with neural fields and other neural integro-differential equations are discussed along with further possible generalizations and applications of the DiPaNet framework.
Improving a Proportional Integral Controller with Reinforcement Learning on a Throttle Valve Benchmark
Feb 21, 2024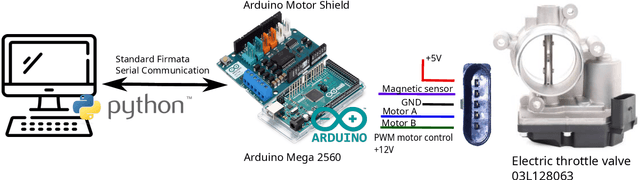
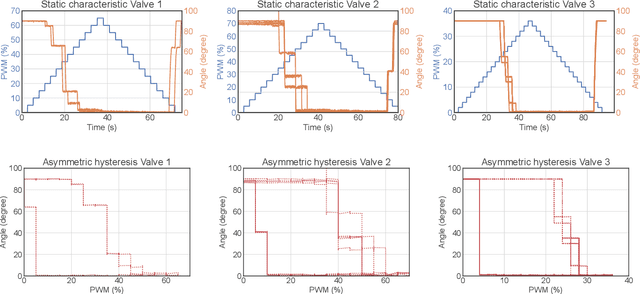
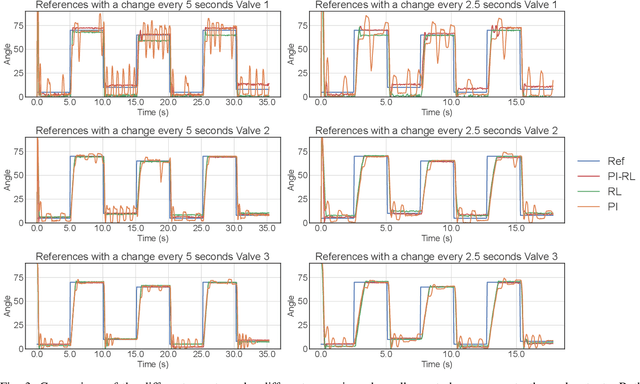
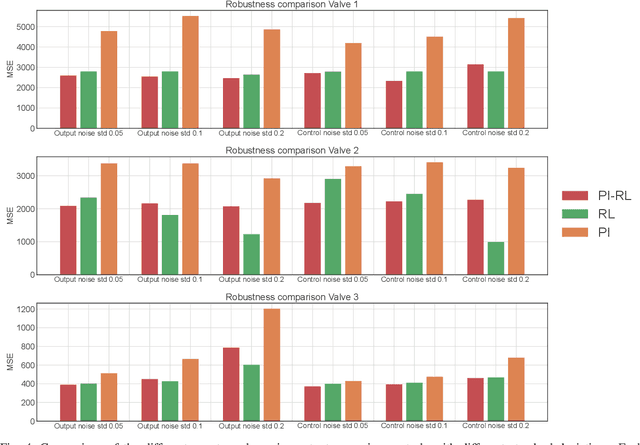
This paper presents a learning-based control strategy for non-linear throttle valves with an asymmetric hysteresis, leading to a near-optimal controller without requiring any prior knowledge about the environment. We start with a carefully tuned Proportional Integrator (PI) controller and exploit the recent advances in Reinforcement Learning (RL) with Guides to improve the closed-loop behavior by learning from the additional interactions with the valve. We test the proposed control method in various scenarios on three different valves, all highlighting the benefits of combining both PI and RL frameworks to improve control performance in non-linear stochastic systems. In all the experimental test cases, the resulting agent has a better sample efficiency than traditional RL agents and outperforms the PI controller.
Enhancing Reinforcement Learning Agents with Local Guides
Feb 21, 2024



This paper addresses the problem of integrating local guide policies into a Reinforcement Learning agent. For this, we show how to adapt existing algorithms to this setting before introducing a novel algorithm based on a noisy policy-switching procedure. This approach builds on a proper Approximate Policy Evaluation (APE) scheme to provide a perturbation that carefully leads the local guides towards better actions. We evaluated our method on a set of classical Reinforcement Learning problems, including safety-critical systems where the agent cannot enter some areas at the risk of triggering catastrophic consequences. In all the proposed environments, our agent proved to be efficient at leveraging those policies to improve the performance of any APE-based Reinforcement Learning algorithm, especially in its first learning stages.
A Trust Region Approach for Few-Shot Sim-to-Real Reinforcement Learning
Dec 24, 2023



Simulation-to-Reality Reinforcement Learning (Sim-to-Real RL) seeks to use simulations to minimize the need for extensive real-world interactions. Specifically, in the few-shot off-dynamics setting, the goal is to acquire a simulator-based policy despite a dynamics mismatch that can be effectively transferred to the real-world using only a handful of real-world transitions. In this context, conventional RL agents tend to exploit simulation inaccuracies resulting in policies that excel in the simulator but underperform in the real environment. To address this challenge, we introduce a novel approach that incorporates a penalty to constrain the trajectories induced by the simulator-trained policy inspired by recent advances in Imitation Learning and Trust Region based RL algorithms. We evaluate our method across various environments representing diverse Sim-to-Real conditions, where access to the real environment is extremely limited. These experiments include high-dimensional systems relevant to real-world applications. Across most tested scenarios, our proposed method demonstrates performance improvements compared to existing baselines.
Enhancing Robustness of On-line Learning Models on Highly Noisy Data
Mar 19, 2021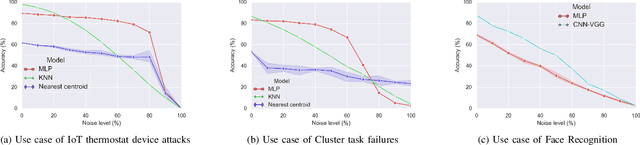
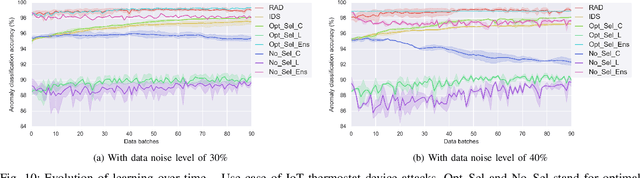
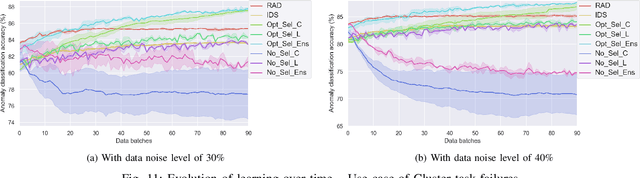
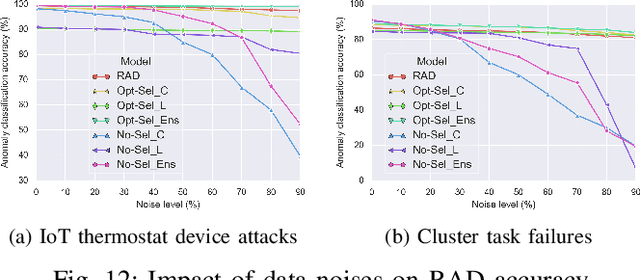
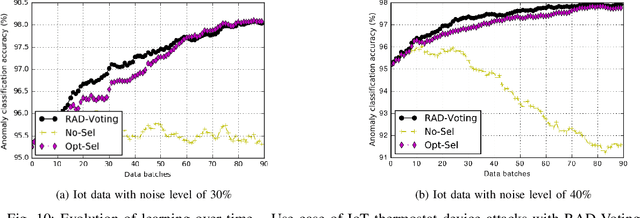
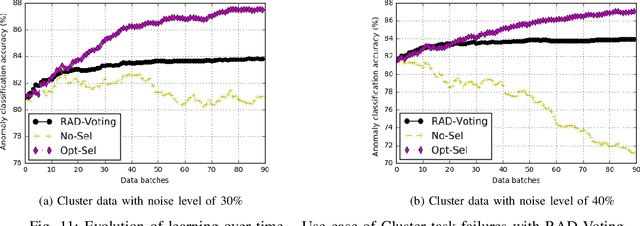
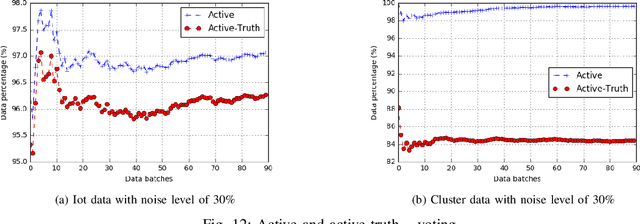
Classification algorithms have been widely adopted to detect anomalies for various systems, e.g., IoT, cloud and face recognition, under the common assumption that the data source is clean, i.e., features and labels are correctly set. However, data collected from the wild can be unreliable due to careless annotations or malicious data transformation for incorrect anomaly detection. In this paper, we extend a two-layer on-line data selection framework: Robust Anomaly Detector (RAD) with a newly designed ensemble prediction where both layers contribute to the final anomaly detection decision. To adapt to the on-line nature of anomaly detection, we consider additional features of conflicting opinions of classifiers, repetitive cleaning, and oracle knowledge. We on-line learn from incoming data streams and continuously cleanse the data, so as to adapt to the increasing learning capacity from the larger accumulated data set. Moreover, we explore the concept of oracle learning that provides additional information of true labels for difficult data points. We specifically focus on three use cases, (i) detecting 10 classes of IoT attacks, (ii) predicting 4 classes of task failures of big data jobs, and (iii) recognising 100 celebrities faces. Our evaluation results show that RAD can robustly improve the accuracy of anomaly detection, to reach up to 98.95% for IoT device attacks (i.e., +7%), up to 85.03% for cloud task failures (i.e., +14%) under 40% label noise, and for its extension, it can reach up to 77.51% for face recognition (i.e., +39%) under 30% label noise. The proposed RAD and its extensions are general and can be applied to different anomaly detection algorithms.
Event-Based Control for Online Training of Neural Networks
Mar 20, 2020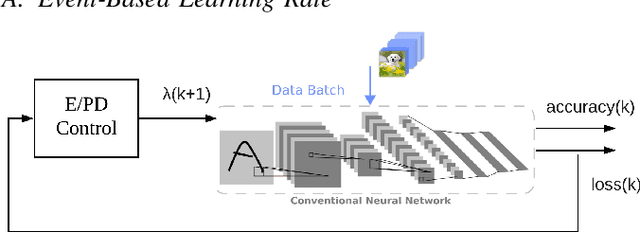
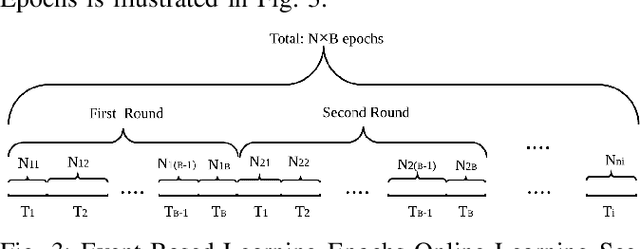
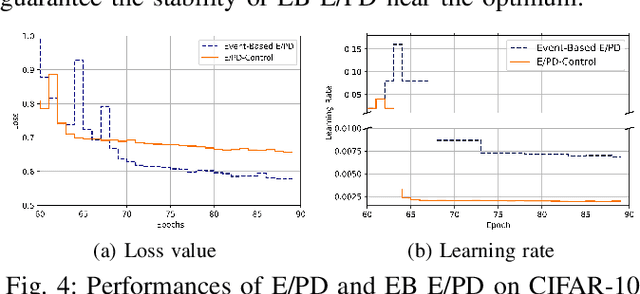
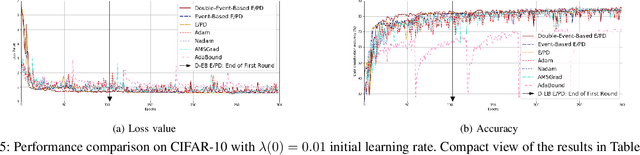
Convolutional Neural Network (CNN) has become the most used method for image classification tasks. During its training the learning rate and the gradient are two key factors to tune for influencing the convergence speed of the model. Usual learning rate strategies are time-based i.e. monotonous decay over time. Recent state-of-the-art techniques focus on adaptive gradient algorithms i.e. Adam and its versions. In this paper we consider an online learning scenario and we propose two Event-Based control loops to adjust the learning rate of a classical algorithm E (Exponential)/PD (Proportional Derivative)-Control. The first Event-Based control loop will be implemented to prevent sudden drop of the learning rate when the model is approaching the optimum. The second Event-Based control loop will decide, based on the learning speed, when to switch to the next data batch. Experimental evaluationis provided using two state-of-the-art machine learning image datasets (CIFAR-10 and CIFAR-100). Results show the Event-Based E/PD is better than the original algorithm (higher final accuracy, lower final loss value), and the Double-Event-BasedE/PD can accelerate the training process, save up to 67% training time compared to state-of-the-art algorithms and even result in better performance.
Feedback Control for Online Training of Neural Networks
Nov 18, 2019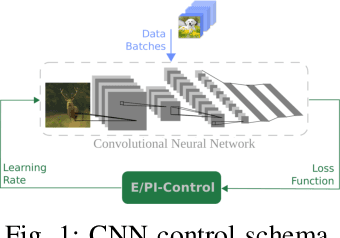
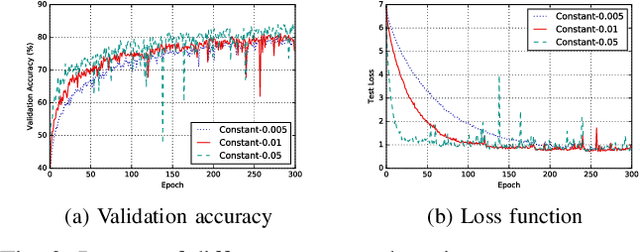
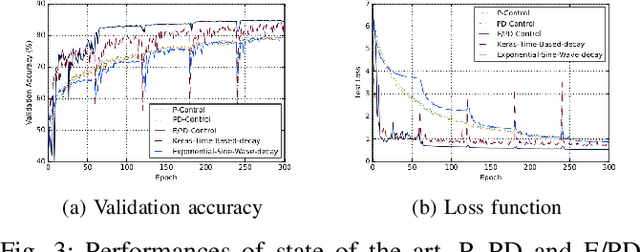
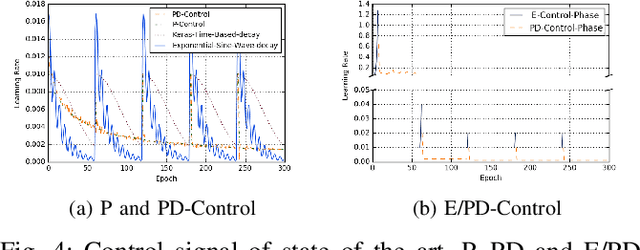
Convolutional neural networks (CNNs) are commonly used for image classification tasks, raising the challenge of their application on data flows. During their training, adaptation is often performed by tuning the learning rate. Usual learning rate strategies are time-based i.e. monotonously decreasing. In this paper, we advocate switching to a performance-based adaptation, in order to improve the learning efficiency. We present E (Exponential)/PD (Proportional Derivative)-Control, a conditional learning rate strategy that combines a feedback PD controller based on the CNN loss function, with an exponential control signal to smartly boost the learning and adapt the PD parameters. Stability proof is provided as well as an experimental evaluation using two state of the art image datasets (CIFAR-10 and Fashion-MNIST). Results show better performances than the related works (faster network accuracy growth reaching higher levels) and robustness of the E/PD-Control regarding its parametrization.
RAD: On-line Anomaly Detection for Highly Unreliable Data
Nov 11, 2019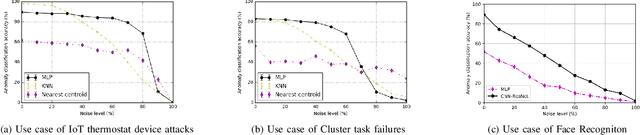
Classification algorithms have been widely adopted to detect anomalies for various systems, e.g., IoT, cloud and face recognition, under the common assumption that the data source is clean, i.e., features and labels are correctly set. However, data collected from the wild can be unreliable due to careless annotations or malicious data transformation for incorrect anomaly detection. In this paper, we present a two-layer on-line learning framework for robust anomaly detection (RAD) in the presence of unreliable anomaly labels, where the first layer is to filter out the suspicious data, and the second layer detects the anomaly patterns from the remaining data. To adapt to the on-line nature of anomaly detection, we extend RAD with additional features of repetitively cleaning, conflicting opinions of classifiers, and oracle knowledge. We on-line learn from the incoming data streams and continuously cleanse the data, so as to adapt to the increasing learning capacity from the larger accumulated data set. Moreover, we explore the concept of oracle learning that provides additional information of true labels for difficult data points. We specifically focus on three use cases, (i) detecting 10 classes of IoT attacks, (ii) predicting 4 classes of task failures of big data jobs, (iii) recognising 20 celebrities faces. Our evaluation results show that RAD can robustly improve the accuracy of anomaly detection, to reach up to 98% for IoT device attacks (i.e., +11%), up to 84% for cloud task failures (i.e., +20%) under 40% noise, and up to 74% for face recognition (i.e., +28%) under 30% noisy labels. The proposed RAD is general and can be applied to different anomaly detection algorithms.