 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStream Function-Based Navigation for Complex Quadcopter Obstacle Avoidance
Jul 09, 2025This article presents a novel stream function-based navigational control system for obstacle avoidance, where obstacles are represented as two-dimensional (2D) rigid surfaces in inviscid, incompressible flows. The approach leverages the vortex panel method (VPM) and incorporates safety margins to control the stream function and flow properties around virtual surfaces, enabling navigation in complex, partially observed environments using real-time sensing. To address the limitations of the VPM in managing relative distance and avoiding rapidly accelerating obstacles at close proximity, the system integrates a model predictive controller (MPC) based on higher-order control barrier functions (HOCBF). This integration incorporates VPM trajectory generation, state estimation, and constraint handling into a receding-horizon optimization problem. The 2D rigid surfaces are enclosed using minimum bounding ellipses (MBEs), while an adaptive Kalman filter (AKF) captures and predicts obstacle dynamics, propagating these estimates into the MPC-HOCBF for rapid avoidance maneuvers. Evaluation is conducted using a PX4-powered Clover drone Gazebo simulator and real-time experiments involving a COEX Clover quadcopter equipped with a 360 degree LiDAR sensor.
Improving a Proportional Integral Controller with Reinforcement Learning on a Throttle Valve Benchmark
Feb 21, 2024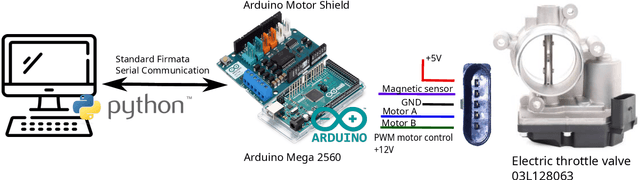
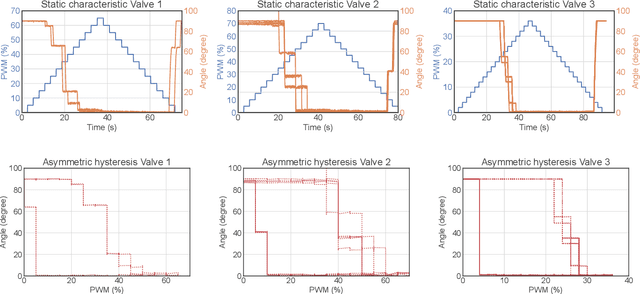
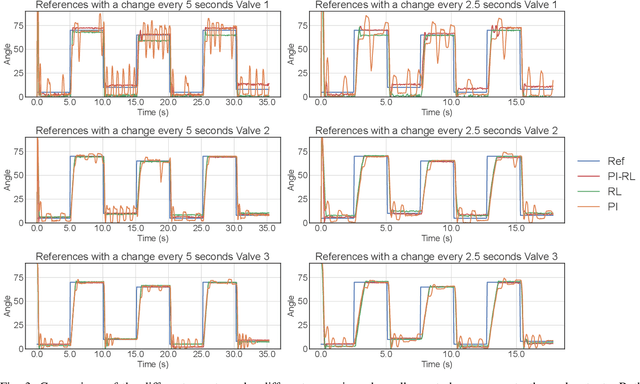
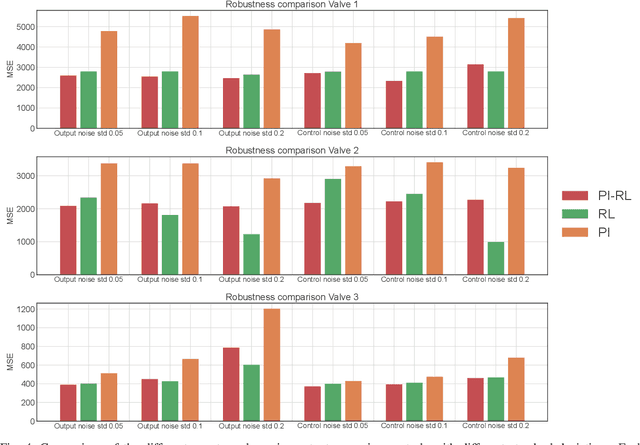
This paper presents a learning-based control strategy for non-linear throttle valves with an asymmetric hysteresis, leading to a near-optimal controller without requiring any prior knowledge about the environment. We start with a carefully tuned Proportional Integrator (PI) controller and exploit the recent advances in Reinforcement Learning (RL) with Guides to improve the closed-loop behavior by learning from the additional interactions with the valve. We test the proposed control method in various scenarios on three different valves, all highlighting the benefits of combining both PI and RL frameworks to improve control performance in non-linear stochastic systems. In all the experimental test cases, the resulting agent has a better sample efficiency than traditional RL agents and outperforms the PI controller.