 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning of Kalman Filtering: From Output to State Estimation
Mar 28, 2026In this paper, we study the problem of learning Kalman filtering with unknown system model in partially observed linear dynamical systems. We propose a unified algorithmic framework based on online optimization that can be used to solve both the output estimation and state estimation scenarios. By exploring the properties of the estimation error cost functions, such as conditionally strong convexity, we show that our algorithm achieves a $\log T$-regret in the horizon length $T$ for the output estimation scenario. More importantly, we tackle the more challenging scenario of learning Kalman filtering for state estimation, which is an open problem in the literature. We first characterize a fundamental limitation of the problem, demonstrating the impossibility of any algorithm to achieve sublinear regret in $T$. By further introducing a random query scheme into our algorithm, we show that a $\sqrt{T}$-regret is achievable when rendering the algorithm limited query access to more informative measurements of the system state in practice. Our algorithm and regret readily capture the trade-off between the number of queries and the achieved regret, and shed light on online learning problems with limited observations. We validate the performance of our algorithms using numerical examples.
Network EM Algorithm for Gaussian Mixture Model in Decentralized Federated Learning
Nov 08, 2024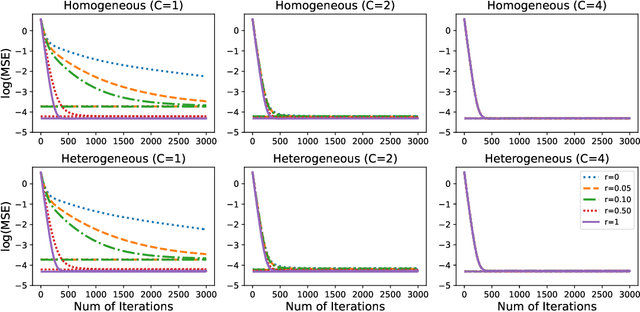
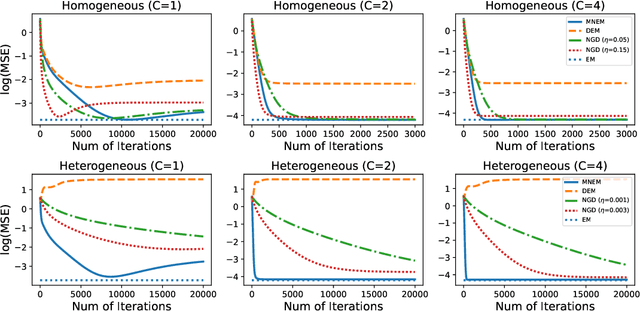
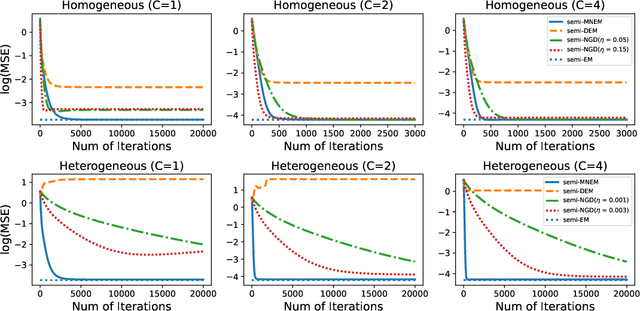
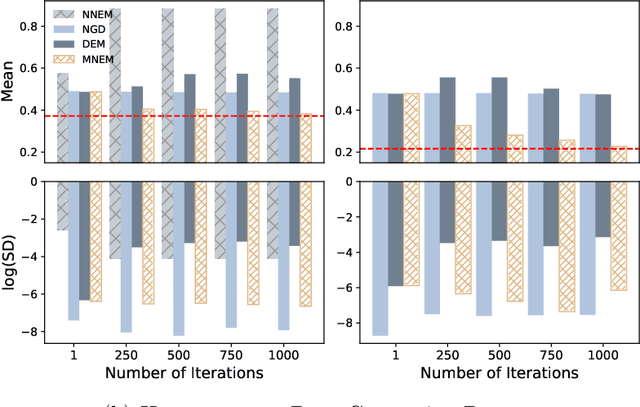
We systematically study various network Expectation-Maximization (EM) algorithms for the Gaussian mixture model within the framework of decentralized federated learning. Our theoretical investigation reveals that directly extending the classical decentralized supervised learning method to the EM algorithm exhibits poor estimation accuracy with heterogeneous data across clients and struggles to converge numerically when Gaussian components are poorly-separated. To address these issues, we propose two novel solutions. First, to handle heterogeneous data, we introduce a momentum network EM (MNEM) algorithm, which uses a momentum parameter to combine information from both the current and historical estimators. Second, to tackle the challenge of poorly-separated Gaussian components, we develop a semi-supervised MNEM (semi-MNEM) algorithm, which leverages partially labeled data. Rigorous theoretical analysis demonstrates that MNEM can achieve statistical efficiency comparable to that of the whole sample estimator when the mixture components satisfy certain separation conditions, even in heterogeneous scenarios. Moreover, the semi-MNEM estimator enhances the convergence speed of the MNEM algorithm, effectively addressing the numerical convergence challenges in poorly-separated scenarios. Extensive simulation and real data analyses are conducted to justify our theoretical findings.
Interactive Prompt Debugging with Sequence Salience
Apr 11, 2024



We present Sequence Salience, a visual tool for interactive prompt debugging with input salience methods. Sequence Salience builds on widely used salience methods for text classification and single-token prediction, and extends this to a system tailored for debugging complex LLM prompts. Our system is well-suited for long texts, and expands on previous work by 1) providing controllable aggregation of token-level salience to the word, sentence, or paragraph level, making salience over long inputs tractable; and 2) supporting rapid iteration where practitioners can act on salience results, refine prompts, and run salience on the new output. We include case studies showing how Sequence Salience can help practitioners work with several complex prompting strategies, including few-shot, chain-of-thought, and constitutional principles. Sequence Salience is built on the Learning Interpretability Tool, an open-source platform for ML model visualizations, and code, notebooks, and tutorials are available at http://goo.gle/sequence-salience.
Neural Quantile Optimization for Edge-Cloud Computing
Jul 11, 2023



We seek the best traffic allocation scheme for the edge-cloud computing network that satisfies constraints and minimizes the cost based on burstable billing. First, for a fixed network topology, we formulate a family of integer programming problems with random parameters describing the various traffic demands. Then, to overcome the difficulty caused by the discrete feature of the problem, we generalize the Gumbel-softmax reparameterization method to induce an unconstrained continuous optimization problem as a regularized continuation of the discrete problem. Finally, we introduce the Gumbel-softmax sampling network to solve the optimization problems via unsupervised learning. The network structure reflects the edge-cloud computing topology and is trained to minimize the expectation of the cost function for unconstrained continuous optimization problems. The trained network works as an efficient traffic allocation scheme sampler, remarkably outperforming the random strategy in feasibility and cost function value. Besides testing the quality of the output allocation scheme, we examine the generalization property of the network by increasing the time steps and the number of users. We also feed the solution to existing integer optimization solvers as initial conditions and verify the warm-starts can accelerate the short-time iteration process. The framework is general with solid performance, and the decoupled feature of the random neural networks is adequate for practical implementations.
Learning to Seek: Multi-Agent Online Source Seeking Against Non-Stochastic Disturbances
Apr 29, 2023This paper proposes to leverage the emerging~learning techniques and devise a multi-agent online source {seeking} algorithm under unknown environment. Of particular significance in our problem setups are: i) the underlying environment is not only unknown, but dynamically changing and also perturbed by two types of non-stochastic disturbances; and ii) a group of agents is deployed and expected to cooperatively seek as many sources as possible. Correspondingly, a new technique of discounted Kalman filter is developed to tackle with the non-stochastic disturbances, and a notion of confidence bound in polytope nature is utilized~to aid the computation-efficient cooperation among~multiple agents. With standard assumptions on the unknown environment as well as the disturbances, our algorithm is shown to achieve sub-linear regrets under the two~types of non-stochastic disturbances; both results are comparable to the state-of-the-art. Numerical examples on a real-world pollution monitoring application are provided to demonstrate the effectiveness of our algorithm.
Multi-Robot Dynamical Source Seeking in Unknown Environments
Mar 19, 2021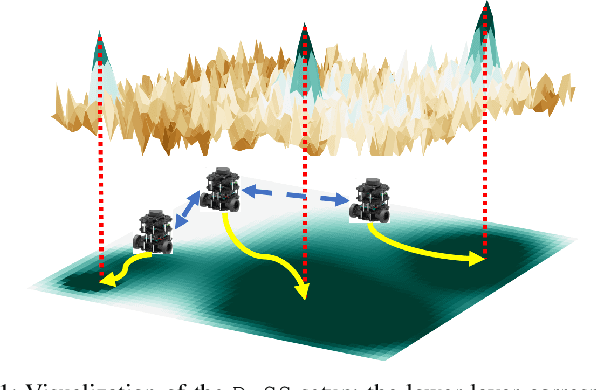

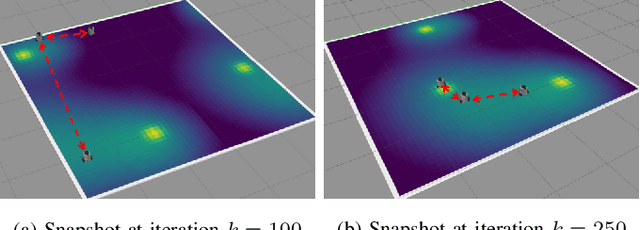
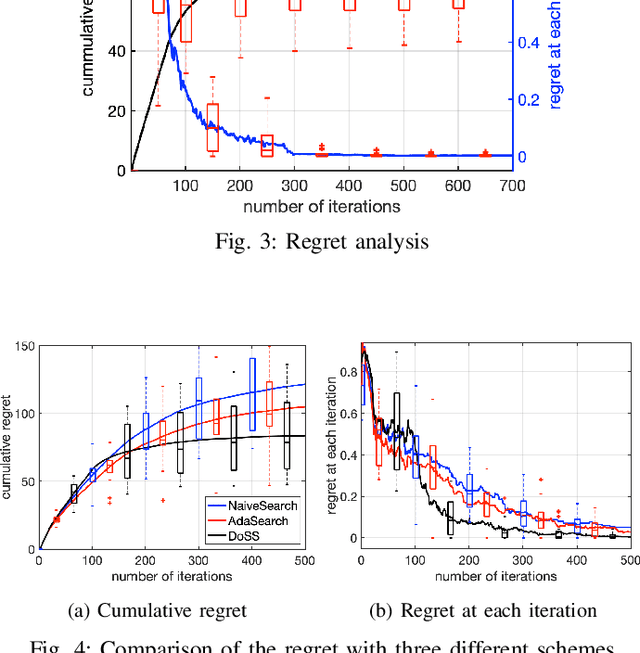
This paper presents an algorithmic framework for the distributed on-line source seeking, termed as 'DoSS', with a multi-robot system in an unknown dynamical environment. Our algorithm, building on a novel concept called dummy confidence upper bound (D-UCB), integrates both estimation of the unknown environment and task planning for the multiple robots simultaneously, and as a result, drives the team of robots to a steady state in which multiple sources of interest are located. Unlike the standard UCB algorithm in the context of multi-armed bandits, the introduction of D-UCB significantly reduces the computational complexity in solving subproblems of the multi-robot task planning. This also enables our 'DoSS' algorithm to be implementable in a distributed on-line manner. The performance of the algorithm is theoretically guaranteed by showing a sub-linear upper bound of the cumulative regret. Numerical results on a real-world methane emission seeking problem are also provided to demonstrate the effectiveness of the proposed algorithm.