 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePILD: Physics-Informed Learning via Diffusion
Jan 29, 2026Diffusion models have emerged as powerful generative tools for modeling complex data distributions, yet their purely data-driven nature limits applicability in practical engineering and scientific problems where physical laws need to be followed. This paper proposes Physics-Informed Learning via Diffusion (PILD), a framework that unifies diffusion modeling and first-principles physical constraints by introducing a virtual residual observation sampled from a Laplace distribution to supervise generation during training. To further integrate physical laws, a conditional embedding module is incorporated to inject physical information into the denoising network at multiple layers, ensuring consistent guidance throughout the diffusion process. The proposed PILD framework is concise, modular, and broadly applicable to problems governed by ordinary differential equations, partial differential equations, as well as algebraic equations or inequality constraints. Extensive experiments across engineering and scientific tasks including estimating vehicle trajectories, tire forces, Darcy flow and plasma dynamics, demonstrate that our PILD substantially improves accuracy, stability, and generalization over existing physics-informed and diffusion-based baselines.
UAV-Based Intelligent Traffic Surveillance System: Real-Time Vehicle Detection, Classification, Tracking, and Behavioral Analysis
Sep 04, 2025Traffic congestion and violations pose significant challenges for urban mobility and road safety. Traditional traffic monitoring systems, such as fixed cameras and sensor-based methods, are often constrained by limited coverage, low adaptability, and poor scalability. To address these challenges, this paper introduces an advanced unmanned aerial vehicle (UAV)-based traffic surveillance system capable of accurate vehicle detection, classification, tracking, and behavioral analysis in real-world, unconstrained urban environments. The system leverages multi-scale and multi-angle template matching, Kalman filtering, and homography-based calibration to process aerial video data collected from altitudes of approximately 200 meters. A case study in urban area demonstrates robust performance, achieving a detection precision of 91.8%, an F1-score of 90.5%, and tracking metrics (MOTA/MOTP) of 92.1% and 93.7%, respectively. Beyond precise detection, the system classifies five vehicle types and automatically detects critical traffic violations, including unsafe lane changes, illegal double parking, and crosswalk obstructions, through the fusion of geofencing, motion filtering, and trajectory deviation analysis. The integrated analytics module supports origin-destination tracking, vehicle count visualization, inter-class correlation analysis, and heatmap-based congestion modeling. Additionally, the system enables entry-exit trajectory profiling, vehicle density estimation across road segments, and movement direction logging, supporting comprehensive multi-scale urban mobility analytics. Experimental results confirms the system's scalability, accuracy, and practical relevance, highlighting its potential as an enforcement-aware, infrastructure-independent traffic monitoring solution for next-generation smart cities.
HCOMC: A Hierarchical Cooperative On-Ramp Merging Control Framework in Mixed Traffic Environment on Two-Lane Highways
Jul 15, 2025Highway on-ramp merging areas are common bottlenecks to traffic congestion and accidents. Currently, a cooperative control strategy based on connected and automated vehicles (CAVs) is a fundamental solution to this problem. While CAVs are not fully widespread, it is necessary to propose a hierarchical cooperative on-ramp merging control (HCOMC) framework for heterogeneous traffic flow on two-lane highways to address this gap. This paper extends longitudinal car-following models based on the intelligent driver model and lateral lane-changing models using the quintic polynomial curve to account for human-driven vehicles (HDVs) and CAVs, comprehensively considering human factors and cooperative adaptive cruise control. Besides, this paper proposes a HCOMC framework, consisting of a hierarchical cooperative planning model based on the modified virtual vehicle model, a discretionary lane-changing model based on game theory, and a multi-objective optimization model using the elitist non-dominated sorting genetic algorithm to ensure the safe, smooth, and efficient merging process. Then, the performance of our HCOMC is analyzed under different traffic densities and CAV penetration rates through simulation. The findings underscore our HCOMC's pronounced comprehensive advantages in enhancing the safety of group vehicles, stabilizing and expediting merging process, optimizing traffic efficiency, and economizing fuel consumption compared with benchmarks.
Trust-MARL: Trust-Based Multi-Agent Reinforcement Learning Framework for Cooperative On-Ramp Merging Control in Heterogeneous Traffic Flow
Jun 14, 2025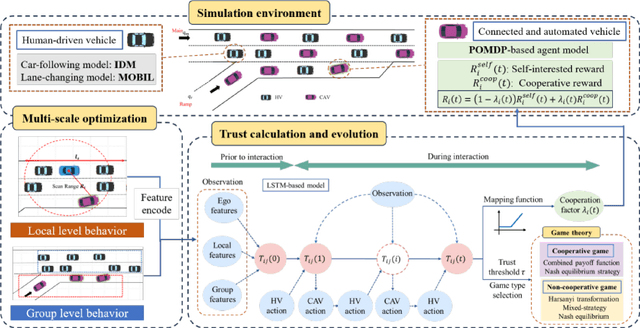

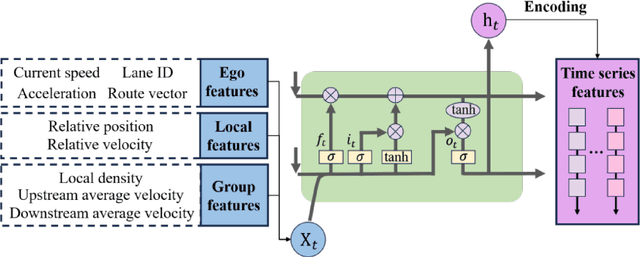
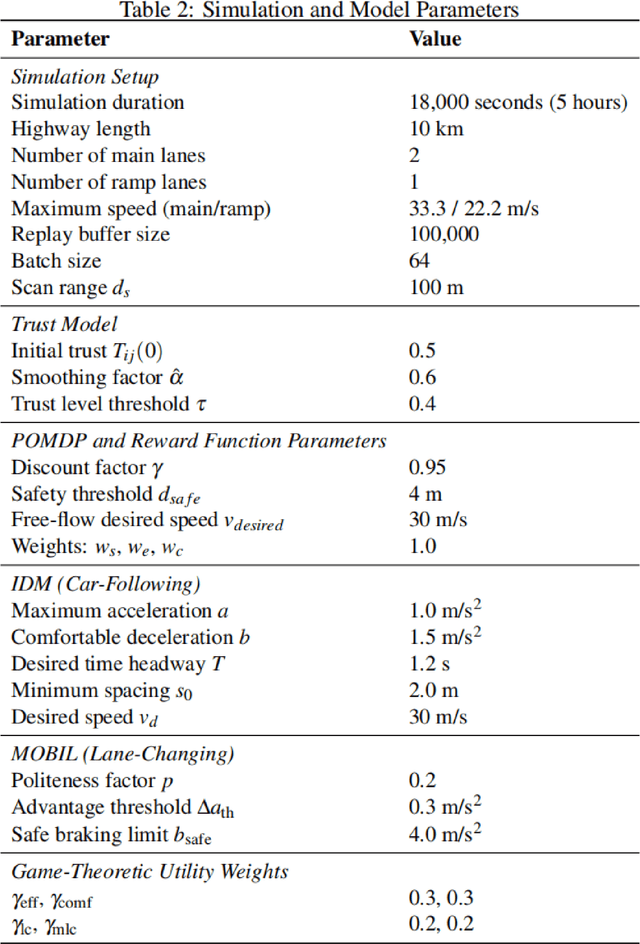
Intelligent transportation systems require connected and automated vehicles (CAVs) to conduct safe and efficient cooperation with human-driven vehicles (HVs) in complex real-world traffic environments. However, the inherent unpredictability of human behaviour, especially at bottlenecks such as highway on-ramp merging areas, often disrupts traffic flow and compromises system performance. To address the challenge of cooperative on-ramp merging in heterogeneous traffic environments, this study proposes a trust-based multi-agent reinforcement learning (Trust-MARL) framework. At the macro level, Trust-MARL enhances global traffic efficiency by leveraging inter-agent trust to improve bottleneck throughput and mitigate traffic shockwave through emergent group-level coordination. At the micro level, a dynamic trust mechanism is designed to enable CAVs to adjust their cooperative strategies in response to real-time behaviors and historical interactions with both HVs and other CAVs. Furthermore, a trust-triggered game-theoretic decision-making module is integrated to guide each CAV in adapting its cooperation factor and executing context-aware lane-changing decisions under safety, comfort, and efficiency constraints. An extensive set of ablation studies and comparative experiments validates the effectiveness of the proposed Trust-MARL approach, demonstrating significant improvements in safety, efficiency, comfort, and adaptability across varying CAV penetration rates and traffic densities.
Learning to Seek: Multi-Agent Online Source Seeking Against Non-Stochastic Disturbances
Apr 29, 2023This paper proposes to leverage the emerging~learning techniques and devise a multi-agent online source {seeking} algorithm under unknown environment. Of particular significance in our problem setups are: i) the underlying environment is not only unknown, but dynamically changing and also perturbed by two types of non-stochastic disturbances; and ii) a group of agents is deployed and expected to cooperatively seek as many sources as possible. Correspondingly, a new technique of discounted Kalman filter is developed to tackle with the non-stochastic disturbances, and a notion of confidence bound in polytope nature is utilized~to aid the computation-efficient cooperation among~multiple agents. With standard assumptions on the unknown environment as well as the disturbances, our algorithm is shown to achieve sub-linear regrets under the two~types of non-stochastic disturbances; both results are comparable to the state-of-the-art. Numerical examples on a real-world pollution monitoring application are provided to demonstrate the effectiveness of our algorithm.
FollowMe: Vehicle Behaviour Prediction in Autonomous Vehicle Settings
Apr 12, 2023An ego vehicle following a virtual lead vehicle planned route is an essential component when autonomous and non-autonomous vehicles interact. Yet, there is a question about the driver's ability to follow the planned lead vehicle route. Thus, predicting the trajectory of the ego vehicle route given a lead vehicle route is of interest. We introduce a new dataset, the FollowMe dataset, which offers a motion and behavior prediction problem by answering the latter question of the driver's ability to follow a lead vehicle. We also introduce a deep spatio-temporal graph model FollowMe-STGCNN as a baseline for the dataset. In our experiments and analysis, we show the design benefits of FollowMe-STGCNN in capturing the interactions that lie within the dataset. We contrast the performance of FollowMe-STGCNN with prior motion prediction models showing the need to have a different design mechanism to address the lead vehicle following settings.
HAR-GCNN: Deep Graph CNNs for Human Activity Recognition From Highly Unlabeled Mobile Sensor Data
Mar 07, 2022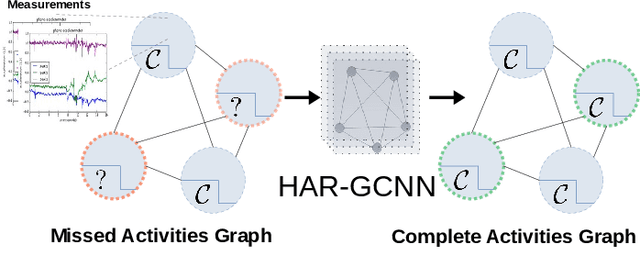
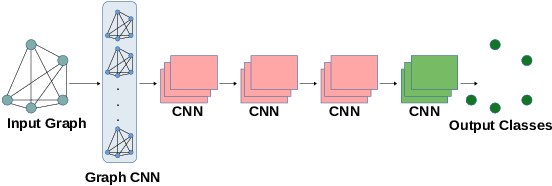
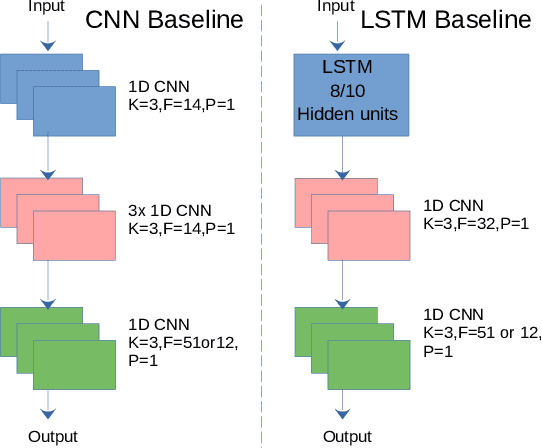
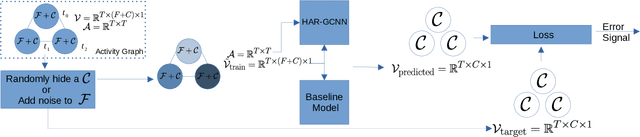
The problem of human activity recognition from mobile sensor data applies to multiple domains, such as health monitoring, personal fitness, daily life logging, and senior care. A critical challenge for training human activity recognition models is data quality. Acquiring balanced datasets containing accurate activity labels requires humans to correctly annotate and potentially interfere with the subjects' normal activities in real-time. Despite the likelihood of incorrect annotation or lack thereof, there is often an inherent chronology to human behavior. For example, we take a shower after we exercise. This implicit chronology can be used to learn unknown labels and classify future activities. In this work, we propose HAR-GCCN, a deep graph CNN model that leverages the correlation between chronologically adjacent sensor measurements to predict the correct labels for unclassified activities that have at least one activity label. We propose a new training strategy enforcing that the model predicts the missing activity labels by leveraging the known ones. HAR-GCCN shows superior performance relative to previously used baseline methods, improving classification accuracy by about 25% and up to 68% on different datasets. Code is available at \url{https://github.com/abduallahmohamed/HAR-GCNN}.
Social-Implicit: Rethinking Trajectory Prediction Evaluation and The Effectiveness of Implicit Maximum Likelihood Estimation
Mar 06, 2022
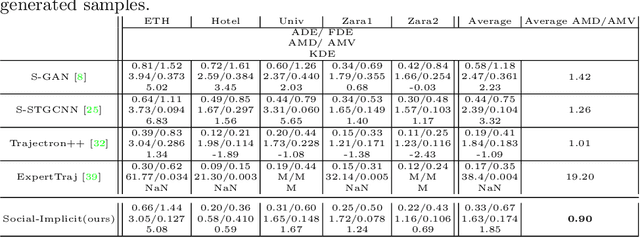

Best-of-N (BoN) Average Displacement Error (ADE)/ Final Displacement Error (FDE) is the most used metric for evaluating trajectory prediction models. Yet, the BoN does not quantify the whole generated samples, resulting in an incomplete view of the model's prediction quality and performance. We propose a new metric, Average Mahalanobis Distance (AMD) to tackle this issue. AMD is a metric that quantifies how close the whole generated samples are to the ground truth. We also introduce the Average Maximum Eigenvalue (AMV) metric that quantifies the overall spread of the predictions. Our metrics are validated empirically by showing that the ADE/FDE is not sensitive to distribution shifts, giving a biased sense of accuracy, unlike the AMD/AMV metrics. We introduce the usage of Implicit Maximum Likelihood Estimation (IMLE) as a replacement for traditional generative models to train our model, Social-Implicit. IMLE training mechanism aligns with AMD/AMV objective of predicting trajectories that are close to the ground truth with a tight spread. Social-Implicit is a memory efficient deep model with only 5.8K parameters that runs in real time of about 580Hz and achieves competitive results. Interactive demo of the problem can be seen here \url{https://www.abduallahmohamed.com/social-implicit-amdamv-adefde-demo}. Code is available at \url{https://github.com/abduallahmohamed/Social-Implicit}.
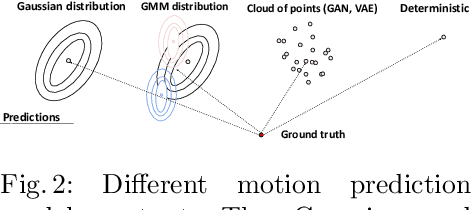
Skeleton-Graph: Long-Term 3D Motion Prediction From 2D Observations Using Deep Spatio-Temporal Graph CNNs
Sep 27, 2021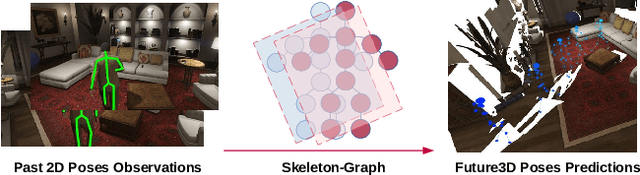
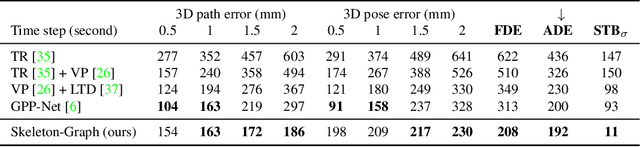
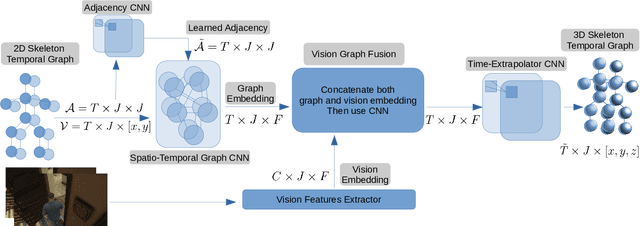
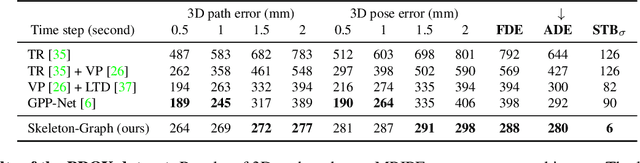
Several applications such as autonomous driving, augmented reality and virtual reality require a precise prediction of the 3D human pose. Recently, a new problem was introduced in the field to predict the 3D human poses from observed 2D poses. We propose Skeleton-Graph, a deep spatio-temporal graph CNN model that predicts the future 3D skeleton poses in a single pass from the 2D ones. Unlike prior works, Skeleton-Graph focuses on modeling the interaction between the skeleton joints by exploiting their spatial configuration. This is being achieved by formulating the problem as a graph structure while learning a suitable graph adjacency kernel. By the design, Skeleton-Graph predicts the future 3D poses without divergence in the long-term, unlike prior works. We also introduce a new metric that measures the divergence of predictions in the long term. Our results show an FDE improvement of at least 27% and an ADE of 4% on both the GTA-IM and PROX datasets respectively in comparison with prior works. Also, we are 88% and 93% less divergence on the long-term motion prediction in comparison with prior works on both GTA-IM and PROX datasets. Code is available at https://github.com/abduallahmohamed/Skeleton-Graph.git
Multi-Robot Dynamical Source Seeking in Unknown Environments
Mar 19, 2021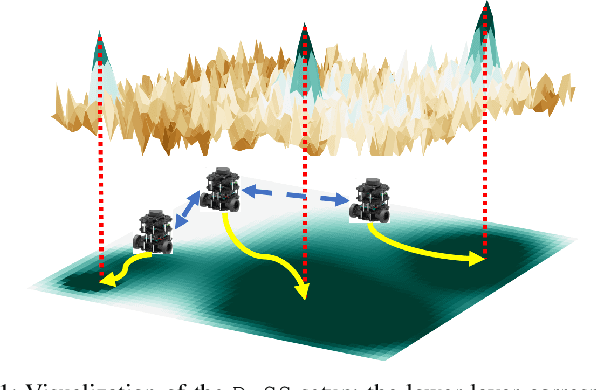

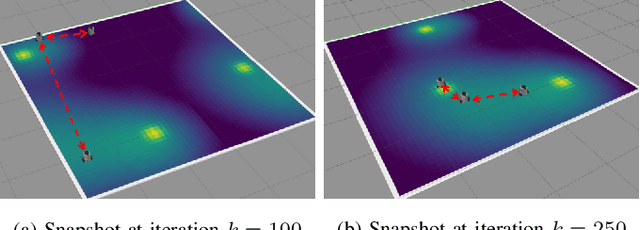
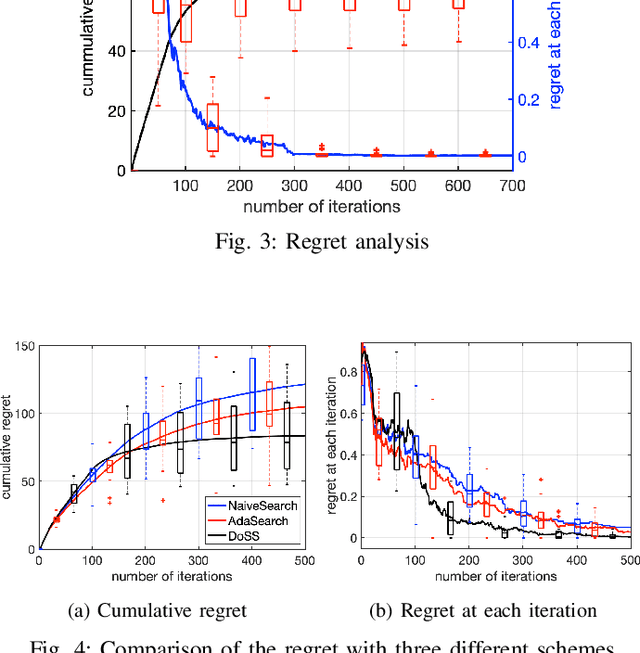
This paper presents an algorithmic framework for the distributed on-line source seeking, termed as 'DoSS', with a multi-robot system in an unknown dynamical environment. Our algorithm, building on a novel concept called dummy confidence upper bound (D-UCB), integrates both estimation of the unknown environment and task planning for the multiple robots simultaneously, and as a result, drives the team of robots to a steady state in which multiple sources of interest are located. Unlike the standard UCB algorithm in the context of multi-armed bandits, the introduction of D-UCB significantly reduces the computational complexity in solving subproblems of the multi-robot task planning. This also enables our 'DoSS' algorithm to be implementable in a distributed on-line manner. The performance of the algorithm is theoretically guaranteed by showing a sub-linear upper bound of the cumulative regret. Numerical results on a real-world methane emission seeking problem are also provided to demonstrate the effectiveness of the proposed algorithm.