 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollowMe: Vehicle Behaviour Prediction in Autonomous Vehicle Settings
Apr 12, 2023An ego vehicle following a virtual lead vehicle planned route is an essential component when autonomous and non-autonomous vehicles interact. Yet, there is a question about the driver's ability to follow the planned lead vehicle route. Thus, predicting the trajectory of the ego vehicle route given a lead vehicle route is of interest. We introduce a new dataset, the FollowMe dataset, which offers a motion and behavior prediction problem by answering the latter question of the driver's ability to follow a lead vehicle. We also introduce a deep spatio-temporal graph model FollowMe-STGCNN as a baseline for the dataset. In our experiments and analysis, we show the design benefits of FollowMe-STGCNN in capturing the interactions that lie within the dataset. We contrast the performance of FollowMe-STGCNN with prior motion prediction models showing the need to have a different design mechanism to address the lead vehicle following settings.
Clustering Human Trust Dynamics for Customized Real-time Prediction
Oct 09, 2021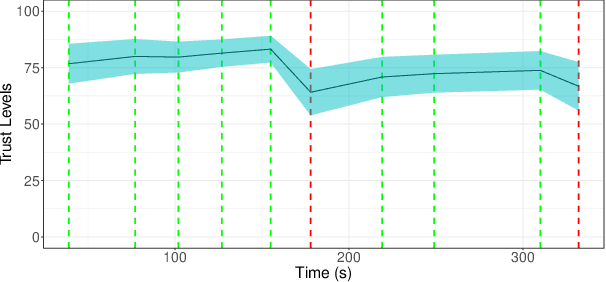
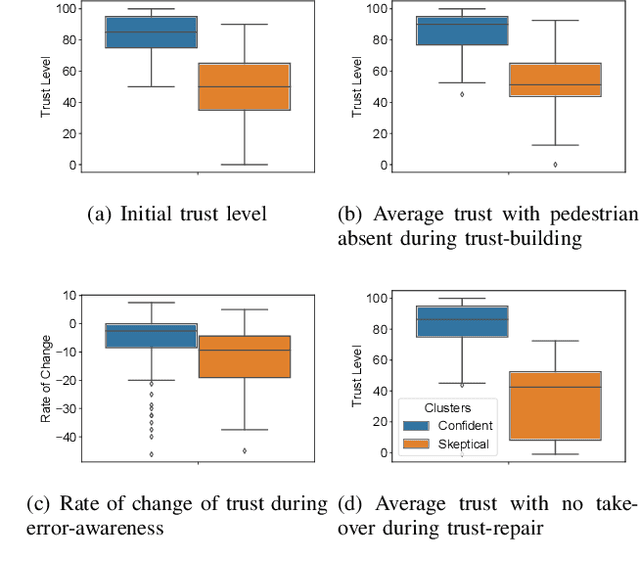
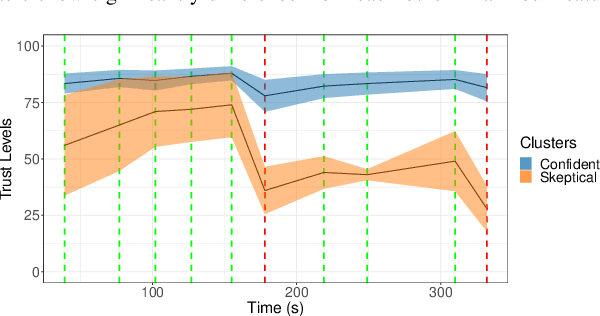
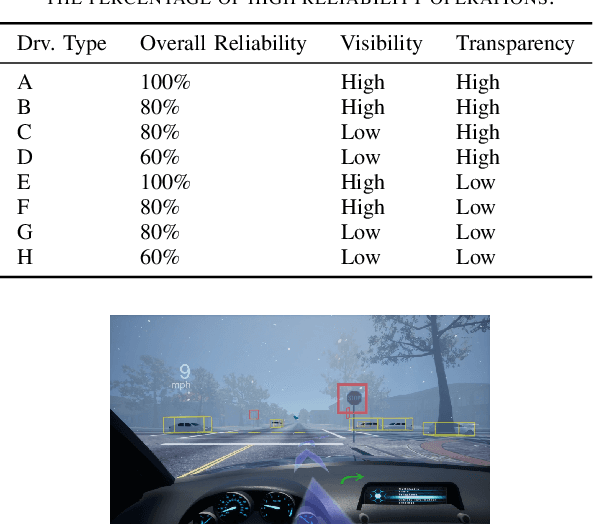
Trust calibration is necessary to ensure appropriate user acceptance in advanced automation technologies. A significant challenge to achieve trust calibration is to quantitatively estimate human trust in real-time. Although multiple trust models exist, these models have limited predictive performance partly due to individual differences in trust dynamics. A personalized model for each person can address this issue, but it requires a significant amount of data for each user. We present a methodology to develop customized model by clustering humans based on their trust dynamics. The clustering-based method addresses the individual differences in trust dynamics while requiring significantly less data than personalized model. We show that our clustering-based customized models not only outperform the general model based on entire population, but also outperform simple demographic factor-based customized models. Specifically, we propose that two models based on ``confident'' and ``skeptical'' group of participants, respectively, can represent the trust behavior of the population. The ``confident'' participants, as compared to the ``skeptical'' participants, have higher initial trust levels, lose trust slower when they encounter low reliability operations, and have higher trust levels during trust-repair after the low reliability operations. In summary, clustering-based customized models improve trust prediction performance for further trust calibration considerations.