 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Tool Dependency Retrieval for Efficient Function Calling
Dec 23, 2025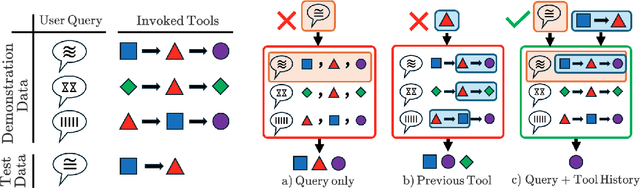
Function calling agents powered by Large Language Models (LLMs) select external tools to automate complex tasks. On-device agents typically use a retrieval module to select relevant tools, improving performance and reducing context length. However, existing retrieval methods rely on static and limited inputs, failing to capture multi-step tool dependencies and evolving task context. This limitation often introduces irrelevant tools that mislead the agent, degrading efficiency and accuracy. We propose Dynamic Tool Dependency Retrieval (DTDR), a lightweight retrieval method that conditions on both the initial query and the evolving execution context. DTDR models tool dependencies from function calling demonstrations, enabling adaptive retrieval as plans unfold. We benchmark DTDR against state-of-the-art retrieval methods across multiple datasets and LLM backbones, evaluating retrieval precision, downstream task accuracy, and computational efficiency. Additionally, we explore strategies to integrate retrieved tools into prompts. Our results show that dynamic tool retrieval improves function calling success rates between $23\%$ and $104\%$ compared to state-of-the-art static retrievers.
Efficient LLM Inference using Dynamic Input Pruning and Cache-Aware Masking
Dec 02, 2024



While mobile devices provide ever more compute power, improvements in DRAM bandwidth are much slower. This is unfortunate for large language model (LLM) token generation, which is heavily memory-bound. Previous work has proposed to leverage natural dynamic activation sparsity in ReLU-activated LLMs to reduce effective DRAM bandwidth per token. However, more recent LLMs use SwiGLU instead of ReLU, which result in little inherent sparsity. While SwiGLU activations can be pruned based on magnitude, the resulting sparsity patterns are difficult to predict, rendering previous approaches ineffective. To circumvent this issue, our work introduces Dynamic Input Pruning (DIP): a predictor-free dynamic sparsification approach, which preserves accuracy with minimal fine-tuning. DIP can further use lightweight LoRA adapters to regain some performance lost during sparsification. Lastly, we describe a novel cache-aware masking strategy, which considers the cache state and activation magnitude to further increase cache hit rate, improving LLM token rate on mobile devices. DIP outperforms other methods in terms of accuracy, memory and throughput trade-offs across simulated hardware settings. On Phi-3-Medium, DIP achieves a 46% reduction in memory and 40% increase in throughput with $<$ 0.1 loss in perplexity.
GNSS Positioning using Cost Function Regulated Multilateration and Graph Neural Networks
Feb 28, 2024



In urban environments, where line-of-sight signals from GNSS satellites are frequently blocked by high-rise objects, GNSS receivers are subject to large errors in measuring satellite ranges. Heuristic methods are commonly used to estimate these errors and reduce the impact of noisy measurements on localization accuracy. In our work, we replace these error estimation heuristics with a deep learning model based on Graph Neural Networks. Additionally, by analyzing the cost function of the multilateration process, we derive an optimal method to utilize the estimated errors. Our approach guarantees that the multilateration converges to the receiver's location as the error estimation accuracy increases. We evaluate our solution on a real-world dataset containing more than 100k GNSS epochs, collected from multiple cities with diverse characteristics. The empirical results show improvements from 40% to 80% in the horizontal localization error against recent deep learning baselines as well as classical localization approaches.
Neural 5G Indoor Localization with IMU Supervision
Feb 15, 2024



Radio signals are well suited for user localization because they are ubiquitous, can operate in the dark and maintain privacy. Many prior works learn mappings between channel state information (CSI) and position fully-supervised. However, that approach relies on position labels which are very expensive to acquire. In this work, this requirement is relaxed by using pseudo-labels during deployment, which are calculated from an inertial measurement unit (IMU). We propose practical algorithms for IMU double integration and training of the localization system. We show decimeter-level accuracy on simulated and challenging real data of 5G measurements. Our IMU-supervised method performs similarly to fully-supervised, but requires much less effort to deploy.
Vision-Assisted Digital Twin Creation for mmWave Beam Management
Jan 31, 2024



In the context of communication networks, digital twin technology provides a means to replicate the radio frequency (RF) propagation environment as well as the system behaviour, allowing for a way to optimize the performance of a deployed system based on simulations. One of the key challenges in the application of Digital Twin technology to mmWave systems is the prevalent channel simulators' stringent requirements on the accuracy of the 3D Digital Twin, reducing the feasibility of the technology in real applications. We propose a practical Digital Twin creation pipeline and a channel simulator, that relies only on a single mounted camera and position information. We demonstrate the performance benefits compared to methods that do not explicitly model the 3D environment, on downstream sub-tasks in beam acquisition, using the real-world dataset of the DeepSense6G challenge