 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBumper Drone: Elastic Morphology Design for Aerial Physical Interaction
Feb 21, 2026Aerial robots are evolving from avoiding obstacles to exploiting the environmental contact interactions for navigation, exploration and manipulation. A key challenge in such aerial physical interactions lies in handling uncertain contact forces on unknown targets, which typically demand accurate sensing and active control. We present a drone platform with elastic horns that enables touch-and-go manoeuvres - a self-regulated, consecutive bumping motion that allows the drone to maintain proximity to a wall without relying on active obstacle avoidance. It leverages environmental interaction as a form of embodied control, where low-level stabilisation and near-obstacle navigation emerge from the passive dynamic responses of the drone-obstacle system that resembles a mass-spring-damper system. Experiments show that the elastic horn can absorb impact energy while maintaining vehicle stability, reducing pitch oscillations by 38% compared to the rigid horn configuration. The lower horn arrangement was found to reduce pitch oscillations by approximately 54%. In addition to intermittent contact, the platform equipped with elastic horns also demonstrates stable, sustained contact with static objects, relying on a standard attitude PID controller.
Learning Agile Tensile Perching for Aerial Robots from Demonstrations
Jul 08, 2025Perching on structures such as trees, beams, and ledges is essential for extending the endurance of aerial robots by enabling energy conservation in standby or observation modes. A tethered tensile perching mechanism offers a simple, adaptable solution that can be retrofitted to existing robots and accommodates a variety of structure sizes and shapes. However, tethered tensile perching introduces significant modelling challenges which require precise management of aerial robot dynamics, including the cases of tether slack & tension, and momentum transfer. Achieving smooth wrapping and secure anchoring by targeting a specific tether segment adds further complexity. In this work, we present a novel trajectory framework for tethered tensile perching, utilizing reinforcement learning (RL) through the Soft Actor-Critic from Demonstrations (SACfD) algorithm. By incorporating both optimal and suboptimal demonstrations, our approach enhances training efficiency and responsiveness, achieving precise control over position and velocity. This framework enables the aerial robot to accurately target specific tether segments, facilitating reliable wrapping and secure anchoring. We validate our framework through extensive simulation and real-world experiments, and demonstrate effectiveness in achieving agile and reliable trajectory generation for tensile perching.
ForestVO: Enhancing Visual Odometry in Forest Environments through ForestGlue
Apr 02, 2025Recent advancements in visual odometry systems have improved autonomous navigation; however, challenges persist in complex environments like forests, where dense foliage, variable lighting, and repetitive textures compromise feature correspondence accuracy. To address these challenges, we introduce ForestGlue, enhancing the SuperPoint feature detector through four configurations - grayscale, RGB, RGB-D, and stereo-vision - optimised for various sensing modalities. For feature matching, we employ LightGlue or SuperGlue, retrained with synthetic forest data. ForestGlue achieves comparable pose estimation accuracy to baseline models but requires only 512 keypoints - just 25% of the baseline's 2048 - to reach an LO-RANSAC AUC score of 0.745 at a 10{\deg} threshold. With only a quarter of keypoints needed, ForestGlue significantly reduces computational overhead, demonstrating effectiveness in dynamic forest environments, and making it suitable for real-time deployment on resource-constrained platforms. By combining ForestGlue with a transformer-based pose estimation model, we propose ForestVO, which estimates relative camera poses using matched 2D pixel coordinates between frames. On challenging TartanAir forest sequences, ForestVO achieves an average relative pose error (RPE) of 1.09 m and a kitti_score of 2.33%, outperforming direct-based methods like DSO by 40% in dynamic scenes. Despite using only 10% of the dataset for training, ForestVO maintains competitive performance with TartanVO while being a significantly lighter model. This work establishes an end-to-end deep learning pipeline specifically tailored for visual odometry in forested environments, leveraging forest-specific training data to optimise feature correspondence and pose estimation, thereby enhancing the accuracy and robustness of autonomous navigation systems.
Exploring the Potential of Multi-modal Sensing Framework for Forest Ecology
Oct 30, 2024
Forests offer essential resources and services to humanity, yet preserving and restoring them presents challenges, particularly due to the limited availability of actionable data, especially in hard-to-reach areas like forest canopies. Accessibility continues to pose a challenge for biologists collecting data in forest environments, often requiring them to invest significant time and energy in climbing trees to place sensors. This operation not only consumes resources but also exposes them to danger. Efforts in robotics have been directed towards accessing the tree canopy using robots. A swarm of drones has showcased autonomous navigation through the canopy, maneuvering with agility and evading tree collisions, all aimed at mapping the area and collecting data. However, relying solely on free-flying drones has proven insufficient for data collection. Flying drones within the canopy generates loud noise, disturbing animals and potentially corrupting the data. Additionally, commercial drones often have limited autonomy for dexterous tasks where aerial physical interaction could be required, further complicating data acquisition efforts. Aerial deployed sensor placement methods such as bio-gliders and sensor shooting have proven effective for data collection within the lower canopy. However, these methods face challenges related to retrieving the data and sensors, often necessitating human intervention.
* Peer-reviewed and accepted in IEEE ICRA 2024 Workshop RUNE
Aerial Tensile Perching and Disentangling Mechanism for Long-Term Environmental Monitoring
Mar 05, 2024Aerial robots show significant potential for forest canopy research and environmental monitoring by providing data collection capabilities at high spatial and temporal resolutions. However, limited flight endurance hinders their application. Inspired by natural perching behaviours, we propose a multi-modal aerial robot system that integrates tensile perching for energy conservation and a suspended actuated pod for data collection. The system consists of a quadrotor drone, a slewing ring mechanism allowing 360{\deg} tether rotation, and a streamlined pod with two ducted propellers connected via a tether. Winding and unwinding the tether allows the pod to move within the canopy, and activating the propellers allows the tether to be wrapped around branches for perching or disentangling. We experimentally determined the minimum counterweights required for stable perching under various conditions. Building on this, we devised and evaluated multiple perching and disentangling strategies. Comparisons of perching and disentangling manoeuvres demonstrate energy savings that could be further maximized with the use of the pod or tether winding. These approaches can reduce energy consumption to only 22\% and 1.5\%, respectively, compared to a drone disentangling manoeuvre. We also calculated the minimum idle time required by the proposed system after the system perching and motor shut down to save energy on a mission, which is 48.9\% of the operating time. Overall, the integrated system expands the operational capabilities and enhances the energy efficiency of aerial robots for long-term monitoring tasks.
Toward Underground Localization: Lidar Inertial Odometry Enabled Aerial Robot Navigation
Oct 29, 2019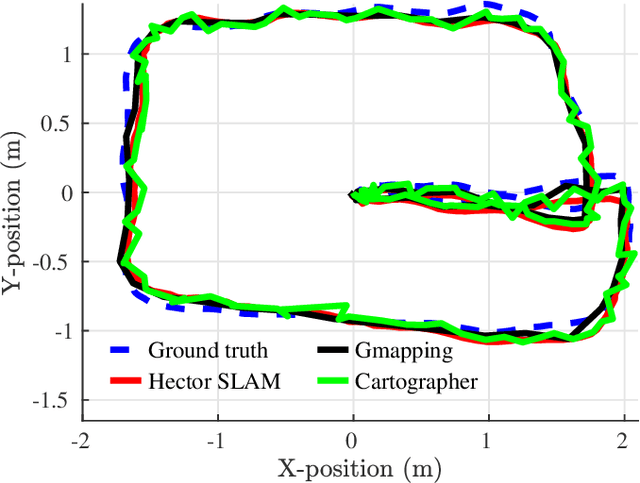
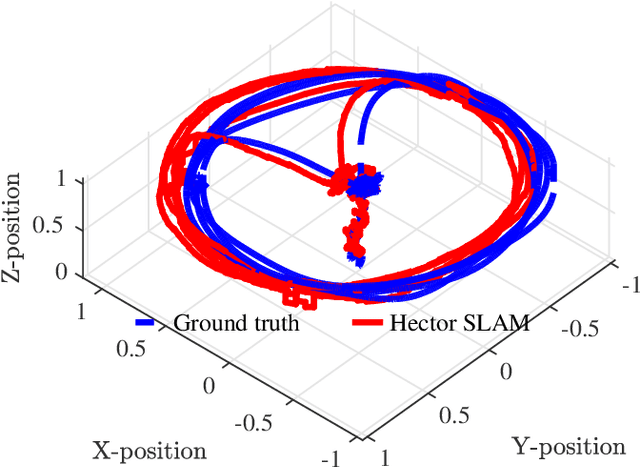
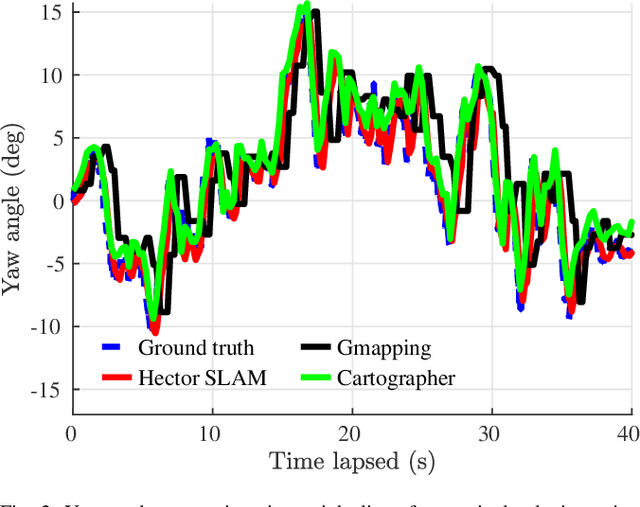
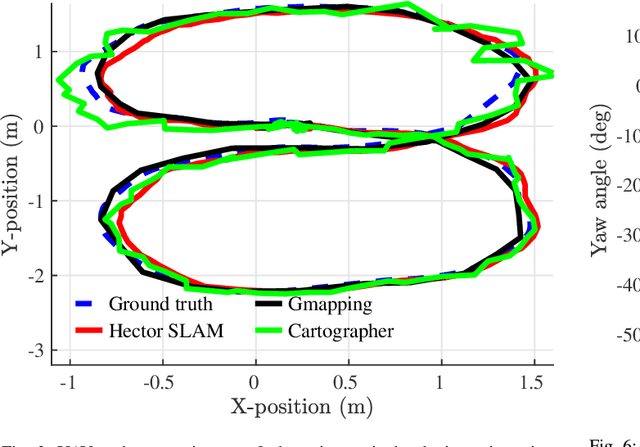
Localization can be achieved by different sensors and techniques such as a global positioning system (GPS), wifi, ultrasonic sensors, and cameras. In this paper, we focus on the laser-based localization method for unmanned aerial vehicle (UAV) applications in a GPS denied environment such as a deep tunnel system. Other than a low-cost 2D LiDAR for the planar axes, a single axis Lidar for the vertical axis as well as an inertial measurement unit (IMU) device is used to increase the reliability and accuracy of the localization performance. We present a comparative analysis of the three selected laser-based simultaneous localization and mapping(SLAM) approaches:(i) Hector SLAM; (ii) Gmapping; and(iii) Cartographer. These algorithms have been implemented and tested through real-world experiments. The results are compared with the ground truth data and the experiments are available at https://youtu.be/kQc3mJjw_mw.
Aerial Robot Control in Close Proximity to Ceiling: A Force Estimation-based Nonlinear MPC
Jul 31, 2019
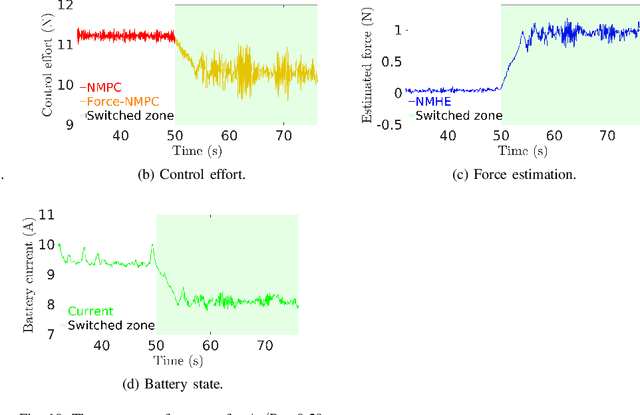
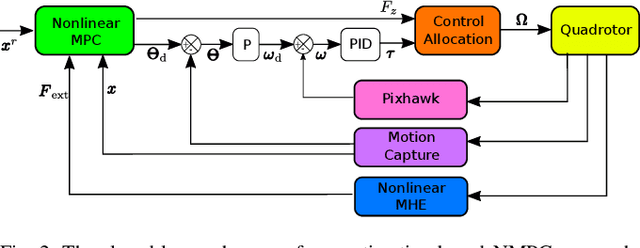

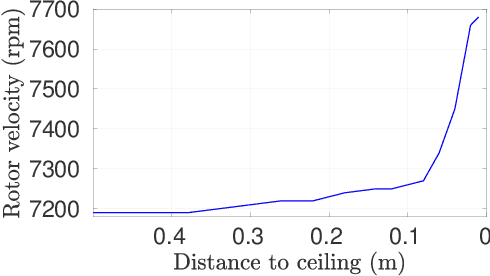
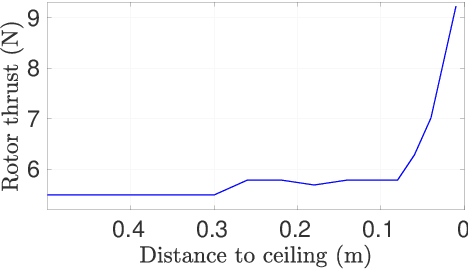
Being motivated by ceiling inspection applications via unmanned aerial vehicles (UAVs) which require close proximity flight to surfaces, a systematic control approach enabling safe and accurate close proximity flight is proposed in this work. There are two main challenges for close proximity flights: (i) the trust characteristics varies drastically for the different distance from the ceiling which results in a complex nonlinear dynamics; (ii) the system needs to consider physical and environmental constraints to safely fly in close proximity. To address these challenges, a novel framework consisting of a constrained optimization-based force estimation and an optimization-based nonlinear controller is proposed. Experimental results illustrate that the performance of the proposed control approach can stabilize UAV down to 1 cm distance to the ceiling. Furthermore, we report that the UAV consumes up to 12.5% less power when it is operated 1 cm distance to ceiling, which is promising potential for more battery-efficient inspection flights.
Real-time UAV Complex Missions Leveraging Self-Adaptive Controller with Elastic Structure
Jul 19, 2019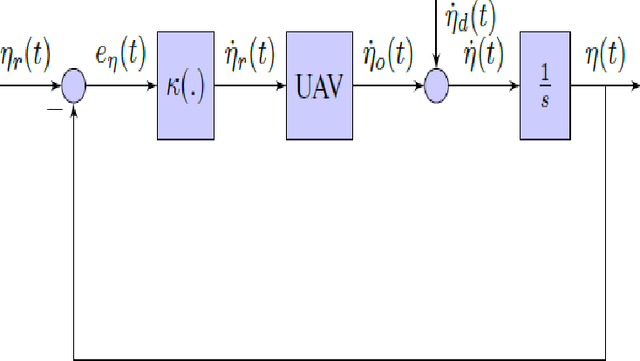
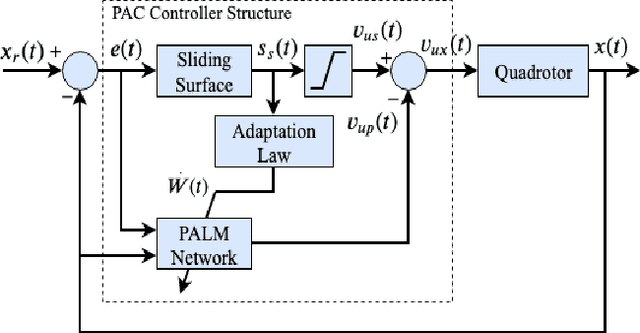
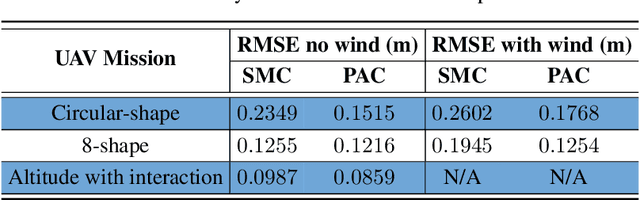
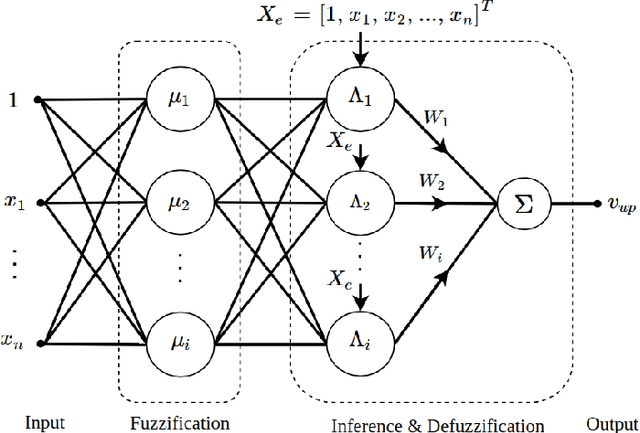
The expectation of unmanned air vehicles (UAVs) pushes the operation environment to narrow spaces, where the systems may fly very close to an object and perform an interaction. This phase brings the variation in UAV dynamics: thrust and drag coefficient of the propellers might change under different proximity. At the same time, UAVs may need to operate under external disturbances to follow time-based trajectories. Under these challenging conditions, a standard controller approach may not handle all missions with a fixed structure, where there may be a need to adjust its parameters for each different case. With these motivations, practical implementation and evaluation of an autonomous controller applied to a quadrotor UAV are proposed in this work. A self-adaptive controller based on a composite control scheme where a combination of sliding mode control (SMC) and evolving neuro-fuzzy control is used. The parameter vector of the neuro-fuzzy controller is updated adaptively based on the sliding surface of the SMC. The autonomous controller possesses a new elastic structure, where the number of fuzzy rules keeps growing or get pruned based on bias and variance balance. The interaction of the UAV is experimentally evaluated in real time considering the ground effect, ceiling effect and flight through a strong fan-generated wind while following time-based trajectories.
UAV Control in Close Proximities - Ceiling Effect on Battery Lifetime
Dec 31, 2018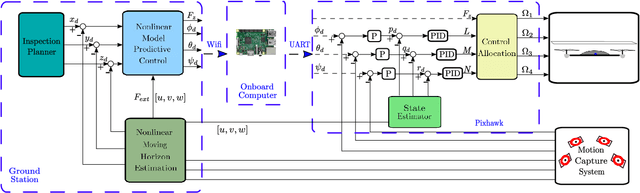
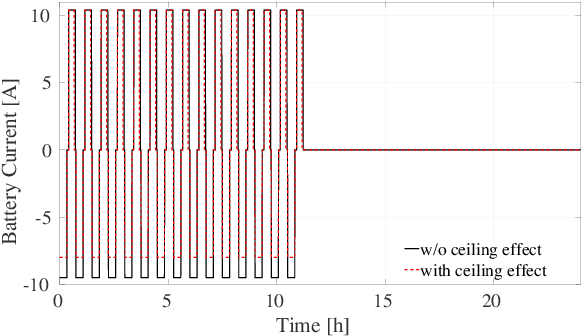
With the recent developments in the unmanned aerial vehicles (UAV), it is expected them to interact and collaborate with their surrounding objects, other robots and people in order to wisely plan and execute particular tasks. Although these interaction operations are inherently challenging as compared to free-flight missions, they might bring diverse advantages. One of them is their basic aerodynamic interaction during the flight in close proximities which can result in a reduction of the controller effort. In this study, by collecting real-time data, we have observed that the current drawn by the battery can be decreased while flying very close to the surroundings with the help of the ceiling effect. For the first time, this phenomenon is analyzed in terms of battery lifetime degradation by using a simple full equivalent cycle counting method. Results show that cycling related effect on battery degradation can be reduced by a 15.77% if the UAV can utilize ceiling effect.