 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Robot Control in Close Proximity to Ceiling: A Force Estimation-based Nonlinear MPC
Jul 31, 2019
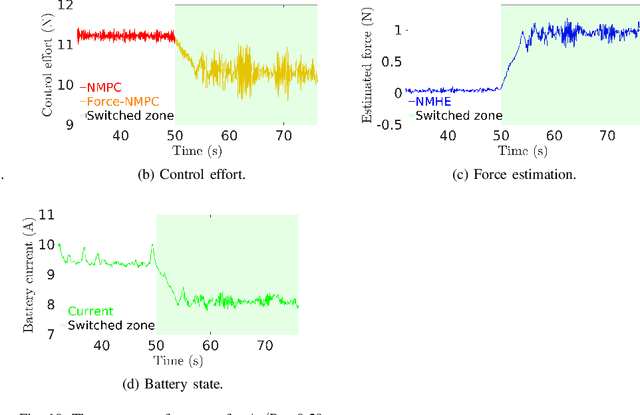
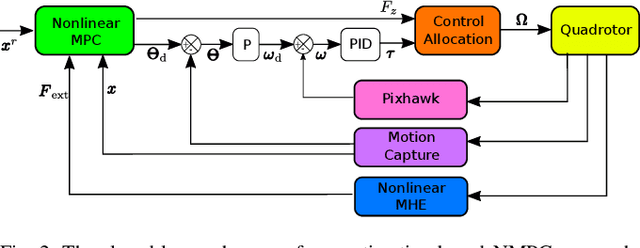

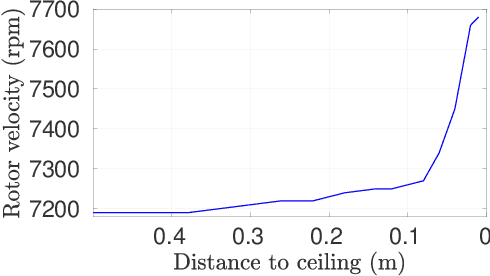
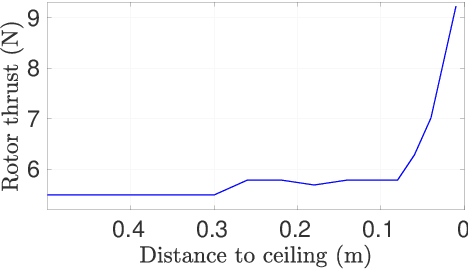
Being motivated by ceiling inspection applications via unmanned aerial vehicles (UAVs) which require close proximity flight to surfaces, a systematic control approach enabling safe and accurate close proximity flight is proposed in this work. There are two main challenges for close proximity flights: (i) the trust characteristics varies drastically for the different distance from the ceiling which results in a complex nonlinear dynamics; (ii) the system needs to consider physical and environmental constraints to safely fly in close proximity. To address these challenges, a novel framework consisting of a constrained optimization-based force estimation and an optimization-based nonlinear controller is proposed. Experimental results illustrate that the performance of the proposed control approach can stabilize UAV down to 1 cm distance to the ceiling. Furthermore, we report that the UAV consumes up to 12.5% less power when it is operated 1 cm distance to ceiling, which is promising potential for more battery-efficient inspection flights.
UAV Control in Close Proximities - Ceiling Effect on Battery Lifetime
Dec 31, 2018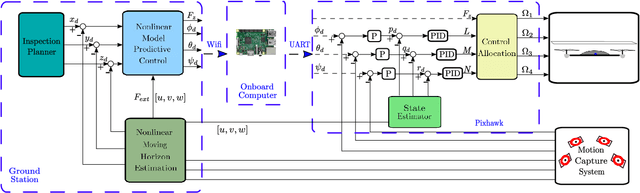
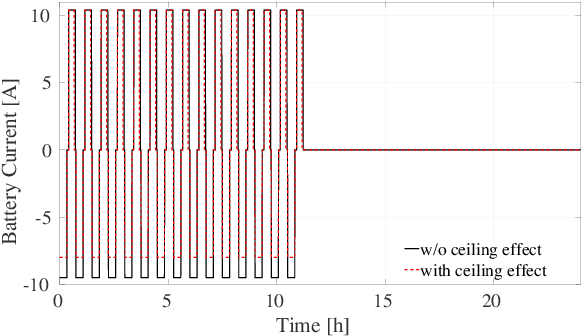
With the recent developments in the unmanned aerial vehicles (UAV), it is expected them to interact and collaborate with their surrounding objects, other robots and people in order to wisely plan and execute particular tasks. Although these interaction operations are inherently challenging as compared to free-flight missions, they might bring diverse advantages. One of them is their basic aerodynamic interaction during the flight in close proximities which can result in a reduction of the controller effort. In this study, by collecting real-time data, we have observed that the current drawn by the battery can be decreased while flying very close to the surroundings with the help of the ceiling effect. For the first time, this phenomenon is analyzed in terms of battery lifetime degradation by using a simple full equivalent cycle counting method. Results show that cycling related effect on battery degradation can be reduced by a 15.77% if the UAV can utilize ceiling effect.
Parsimonious Network based on Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis
Feb 05, 2018

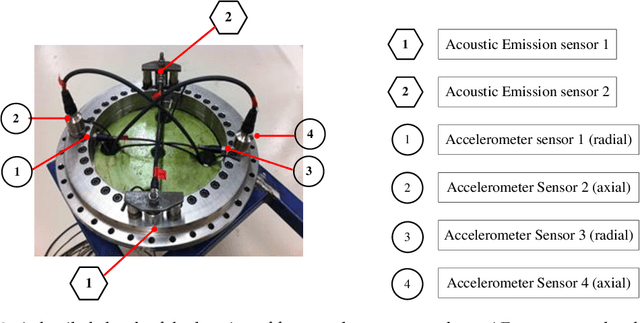

In recent years, the utilization of rotating parts, e.g. bearings and gears, has been continuously supporting the manufacturing line to produce consistent output quality. Due to their critical role, the breakdown of these components might significantly impact the production rate. A proper condition based monitoring (CBM) is among a few ways to maintain and monitor the rotating systems. Prognosis, as one of the major tasks in CBM that predicts and estimates the remaining useful life of the machine, has attracted significant interest in decades. This paper presents a literature review on prognosis approaches from published papers in the last decade. The prognostic approaches are described comprehensively to provide a better idea on how to select an appropriate prognosis method for specific needs. An advanced predictive analytics, namely Parsimonious Network Based on Fuzzy Inference System (PANFIS), was proposed and tested into the low speed slew bearing data. PANFIS differs itself from conventional prognostic approaches in which it supports for online lifelong prognostics without the requirement of retraining or reconfiguration phase. The method is applied to normal-to-failure bearing vibration data collected for 139 days and to predict the time-domain features of vibration slew bearing signals. The performance of the proposed method is compared to some established methods such as ANFIS, eTS, and Simp_eTS. From the results, it is suggested that PANFIS offers outstanding performance compared to those of other methods.
Performance Control of Tendon-Driven Endoscopic Surgical Robots With Friction and Hysteresis
Feb 06, 2017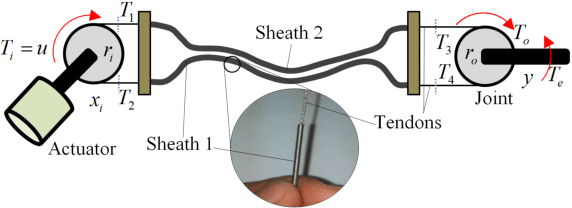
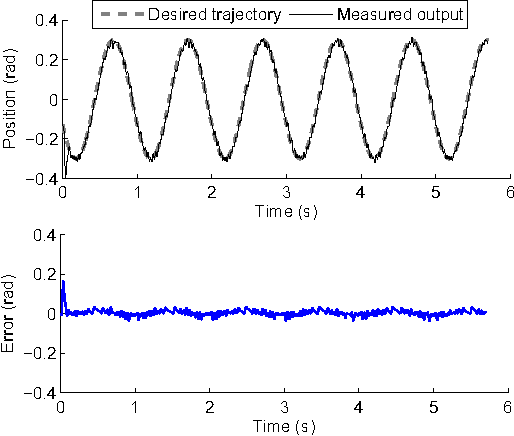
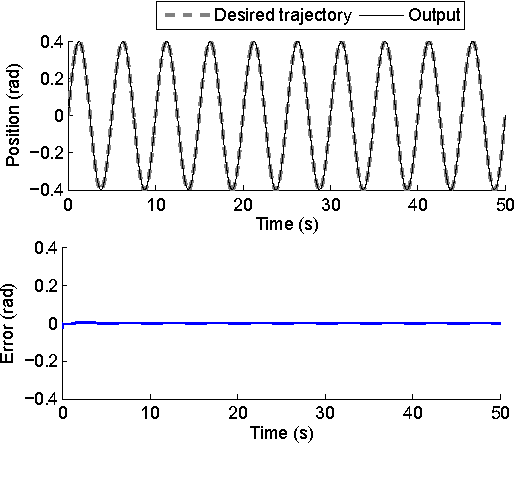
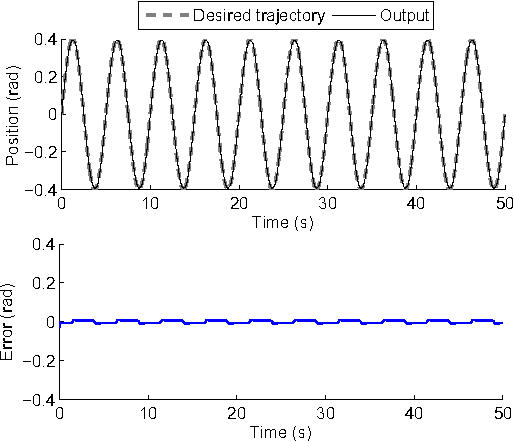
In this study, a new position control scheme for the tendon-sheath mechanism (TSM) which is used in flexible medical devices is presented. TSM is widely used in dexterous robotic applications because it can flexibly work in limited space, in constrained environments, and provides efficient power transmission from the external actuator to the distal joint. However, nonlinearities from friction and backlash hysteresis between the tendon and the sheath pose challenges in achieving precise position controls of the end effector. Previous studies on the TSM only address the control problem under the assumptions of known tendon-sheath configuration and known model parameters of the backlash hysteresis nonlinearity. These approaches can have adverse impact and limitations on the overall system performances and practical implementation. This paper presents a new approach to model and control the TSM-driven flexible robotic systems. The designed controller does not require exact knowledge of nonlinear friction and backlash hysteresis parameters, only their bounds are online estimated. Simulation and experimental validation results show that the proposed control scheme can significantly improve the tracking performances without the presence of the exact knowledge of the model parameters and the sheath configuration.