 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Control of Tendon-Driven Endoscopic Surgical Robots With Friction and Hysteresis
Paper and Code
Feb 06, 2017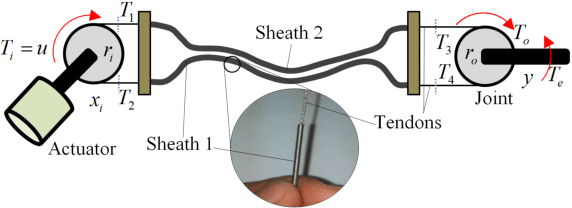
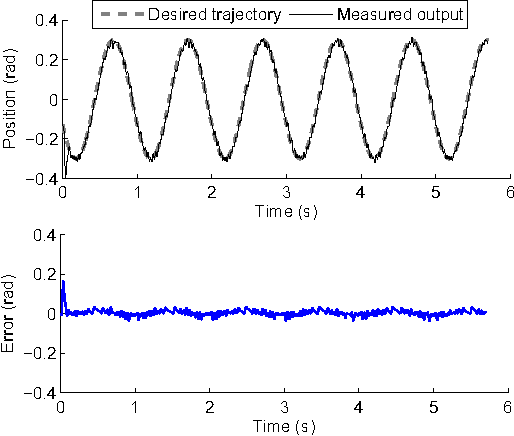
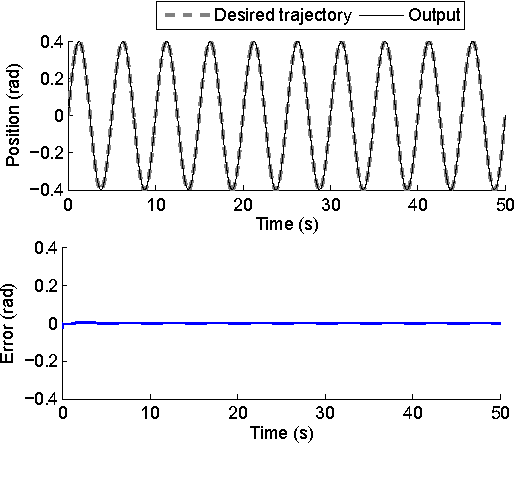
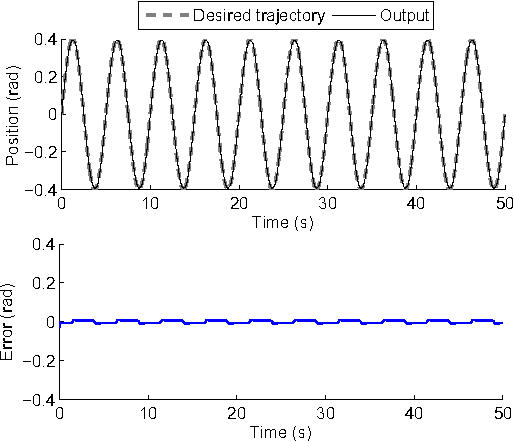
In this study, a new position control scheme for the tendon-sheath mechanism (TSM) which is used in flexible medical devices is presented. TSM is widely used in dexterous robotic applications because it can flexibly work in limited space, in constrained environments, and provides efficient power transmission from the external actuator to the distal joint. However, nonlinearities from friction and backlash hysteresis between the tendon and the sheath pose challenges in achieving precise position controls of the end effector. Previous studies on the TSM only address the control problem under the assumptions of known tendon-sheath configuration and known model parameters of the backlash hysteresis nonlinearity. These approaches can have adverse impact and limitations on the overall system performances and practical implementation. This paper presents a new approach to model and control the TSM-driven flexible robotic systems. The designed controller does not require exact knowledge of nonlinear friction and backlash hysteresis parameters, only their bounds are online estimated. Simulation and experimental validation results show that the proposed control scheme can significantly improve the tracking performances without the presence of the exact knowledge of the model parameters and the sheath configuration.