 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Robot Control in Close Proximity to Ceiling: A Force Estimation-based Nonlinear MPC
Paper and Code
Jul 31, 2019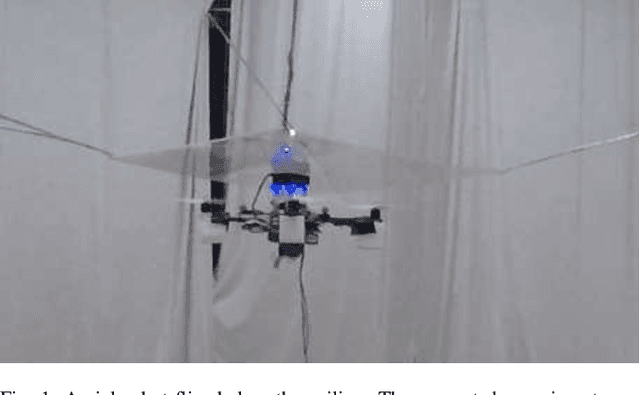
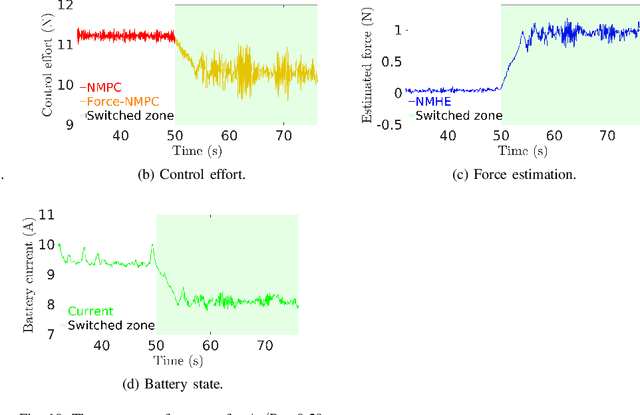
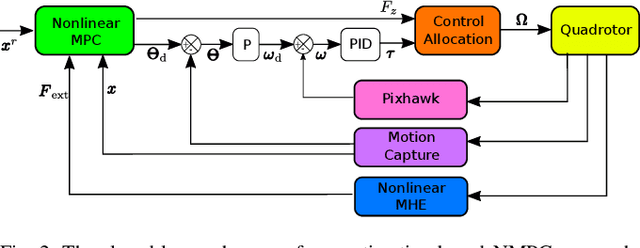

Being motivated by ceiling inspection applications via unmanned aerial vehicles (UAVs) which require close proximity flight to surfaces, a systematic control approach enabling safe and accurate close proximity flight is proposed in this work. There are two main challenges for close proximity flights: (i) the trust characteristics varies drastically for the different distance from the ceiling which results in a complex nonlinear dynamics; (ii) the system needs to consider physical and environmental constraints to safely fly in close proximity. To address these challenges, a novel framework consisting of a constrained optimization-based force estimation and an optimization-based nonlinear controller is proposed. Experimental results illustrate that the performance of the proposed control approach can stabilize UAV down to 1 cm distance to the ceiling. Furthermore, we report that the UAV consumes up to 12.5% less power when it is operated 1 cm distance to ceiling, which is promising potential for more battery-efficient inspection flights.