 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time UAV Complex Missions Leveraging Self-Adaptive Controller with Elastic Structure
Paper and Code
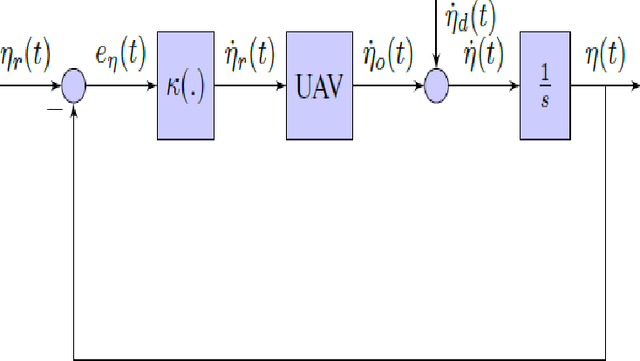
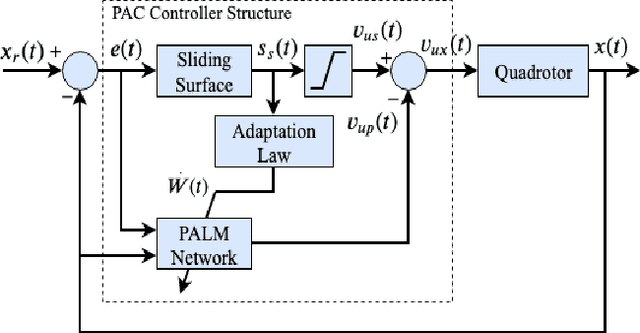
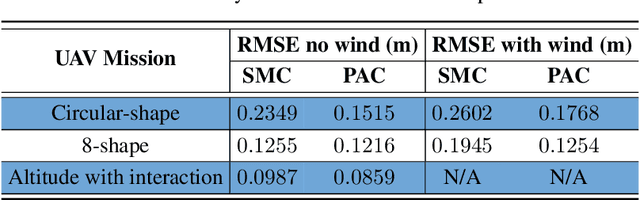
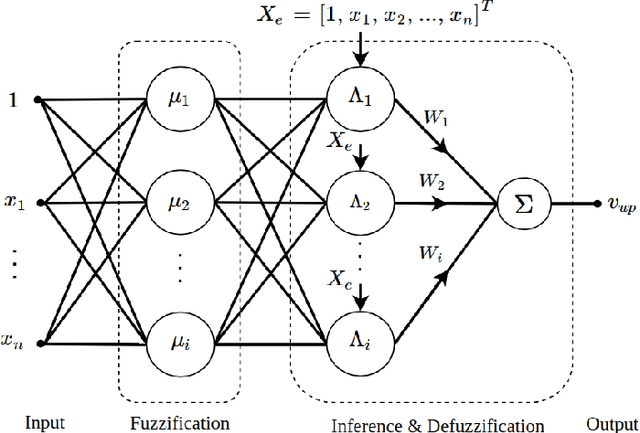
The expectation of unmanned air vehicles (UAVs) pushes the operation environment to narrow spaces, where the systems may fly very close to an object and perform an interaction. This phase brings the variation in UAV dynamics: thrust and drag coefficient of the propellers might change under different proximity. At the same time, UAVs may need to operate under external disturbances to follow time-based trajectories. Under these challenging conditions, a standard controller approach may not handle all missions with a fixed structure, where there may be a need to adjust its parameters for each different case. With these motivations, practical implementation and evaluation of an autonomous controller applied to a quadrotor UAV are proposed in this work. A self-adaptive controller based on a composite control scheme where a combination of sliding mode control (SMC) and evolving neuro-fuzzy control is used. The parameter vector of the neuro-fuzzy controller is updated adaptively based on the sliding surface of the SMC. The autonomous controller possesses a new elastic structure, where the number of fuzzy rules keeps growing or get pruned based on bias and variance balance. The interaction of the UAV is experimentally evaluated in real time considering the ground effect, ceiling effect and flight through a strong fan-generated wind while following time-based trajectories.