 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly Supervised Deep Learning Approach in Streaming Environments
Nov 14, 2019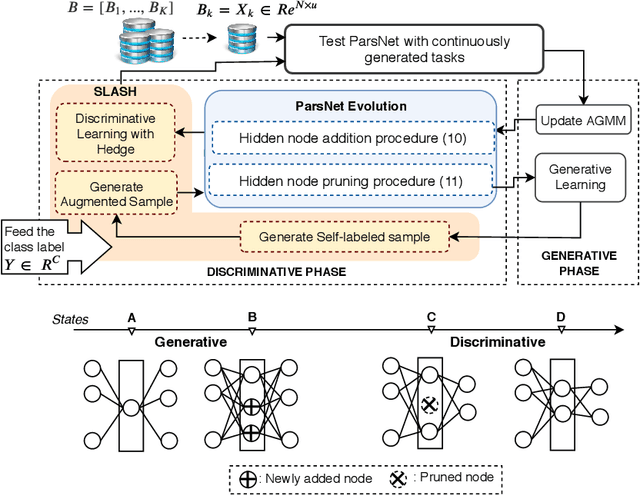
The feasibility of existing data stream algorithms is often hindered by the weakly supervised condition of data streams. A self-evolving deep neural network, namely Parsimonious Network (ParsNet), is proposed as a solution to various weakly-supervised data stream problems. A self-labelling strategy with hedge (SLASH) is proposed in which its auto-correction mechanism copes with \textit{the accumulation of mistakes} significantly affecting the model's generalization. ParsNet is developed from a closed-loop configuration of the self-evolving generative and discriminative training processes exploiting shared parameters in which its structure flexibly grows and shrinks to overcome the issue of concept drift with/without labels. The numerical evaluation has been performed under two challenging problems, namely sporadic access to ground truth and infinitely delayed access to the ground truth. Our numerical study shows the advantage of ParsNet with a substantial margin from its counterparts in the high-dimensional data streams and infinite delay simulation protocol. To support the reproducible research initiative, the source code of ParsNet along with supplementary materials are made available at https://bit.ly/2qNW7p4.
Real-time UAV Complex Missions Leveraging Self-Adaptive Controller with Elastic Structure
Jul 19, 2019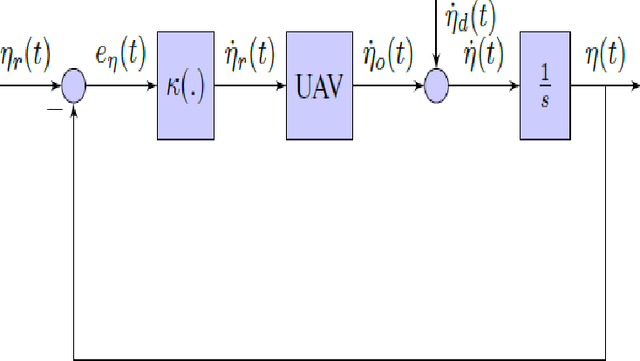
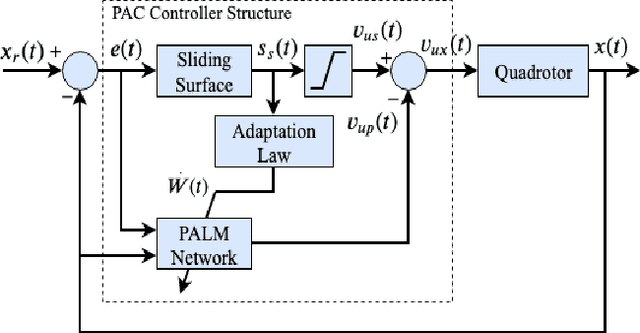
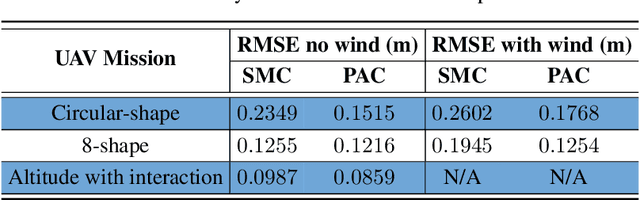
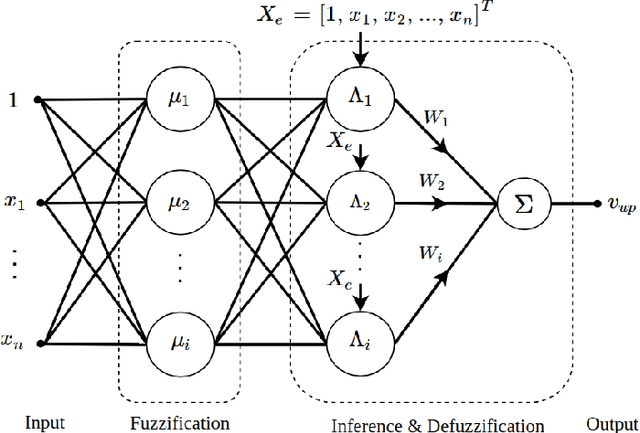
The expectation of unmanned air vehicles (UAVs) pushes the operation environment to narrow spaces, where the systems may fly very close to an object and perform an interaction. This phase brings the variation in UAV dynamics: thrust and drag coefficient of the propellers might change under different proximity. At the same time, UAVs may need to operate under external disturbances to follow time-based trajectories. Under these challenging conditions, a standard controller approach may not handle all missions with a fixed structure, where there may be a need to adjust its parameters for each different case. With these motivations, practical implementation and evaluation of an autonomous controller applied to a quadrotor UAV are proposed in this work. A self-adaptive controller based on a composite control scheme where a combination of sliding mode control (SMC) and evolving neuro-fuzzy control is used. The parameter vector of the neuro-fuzzy controller is updated adaptively based on the sliding surface of the SMC. The autonomous controller possesses a new elastic structure, where the number of fuzzy rules keeps growing or get pruned based on bias and variance balance. The interaction of the UAV is experimentally evaluated in real time considering the ground effect, ceiling effect and flight through a strong fan-generated wind while following time-based trajectories.