 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Underground Localization: Lidar Inertial Odometry Enabled Aerial Robot Navigation
Paper and Code
Oct 29, 2019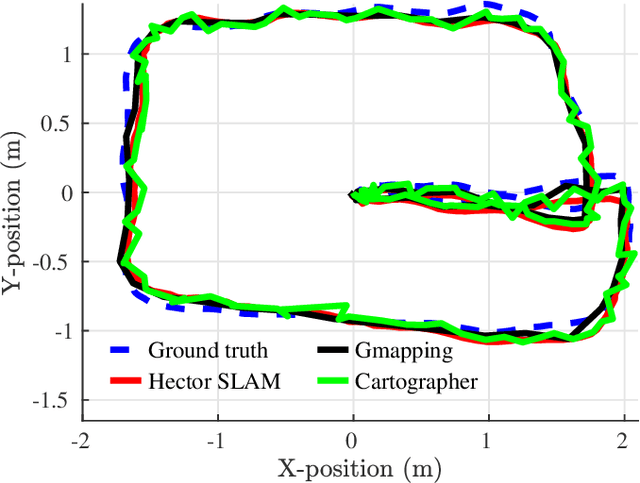
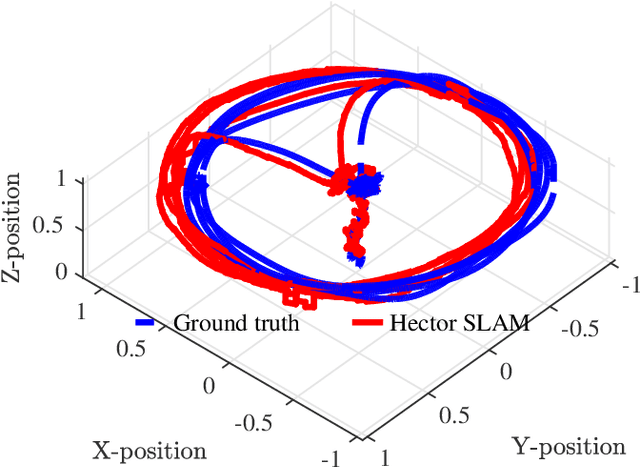
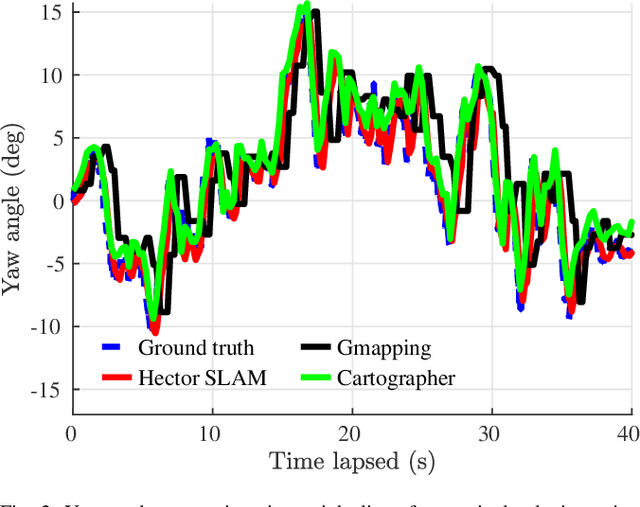
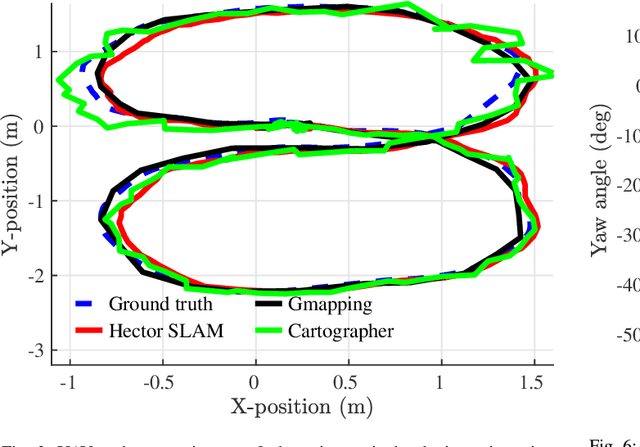
Localization can be achieved by different sensors and techniques such as a global positioning system (GPS), wifi, ultrasonic sensors, and cameras. In this paper, we focus on the laser-based localization method for unmanned aerial vehicle (UAV) applications in a GPS denied environment such as a deep tunnel system. Other than a low-cost 2D LiDAR for the planar axes, a single axis Lidar for the vertical axis as well as an inertial measurement unit (IMU) device is used to increase the reliability and accuracy of the localization performance. We present a comparative analysis of the three selected laser-based simultaneous localization and mapping(SLAM) approaches:(i) Hector SLAM; (ii) Gmapping; and(iii) Cartographer. These algorithms have been implemented and tested through real-world experiments. The results are compared with the ground truth data and the experiments are available at https://youtu.be/kQc3mJjw_mw.