 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying a Quadrotor with Unknown Actuators and Sensor Configuration
Sep 02, 2024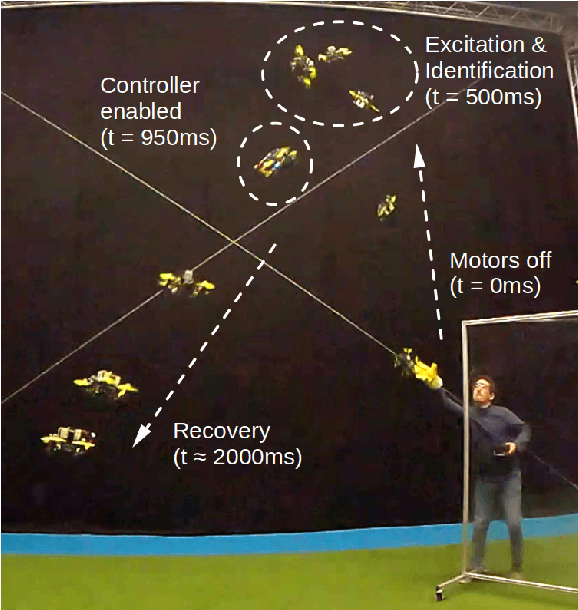
Though control algorithms for multirotor Unmanned Air Vehicle (UAV) are well understood, the configuration, parameter estimation, and tuning of flight control algorithms takes quite some time and resources. In previous work, we have shown that it is possible to identify the control effectiveness and motor dynamics of a multirotor fast enough for it to recover to a stable hover after being thrown 4 meters in the air. In this paper, we extend this to include estimation of the position of the Inertial Measurement Unit (IMU) relative to the Center of Gravity (CoG), estimation of the IMU rotation, the thrust direction of all motors and the optimal combined thrust direction. In order to guarantee a correct IMU position estimation, two prior throw-and-catches of the vehicle with spin around different axes are required. For these throws, a height as low as 1 meter is sufficient. Quadrotor flight experimentation confirms the efficacy of the approach, and a simulation shows its applicability to fully-actuated crafts with multiple possible hover orientations.
Control of Unknown Quadrotors from a Single Throw
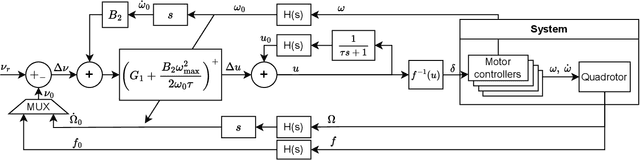
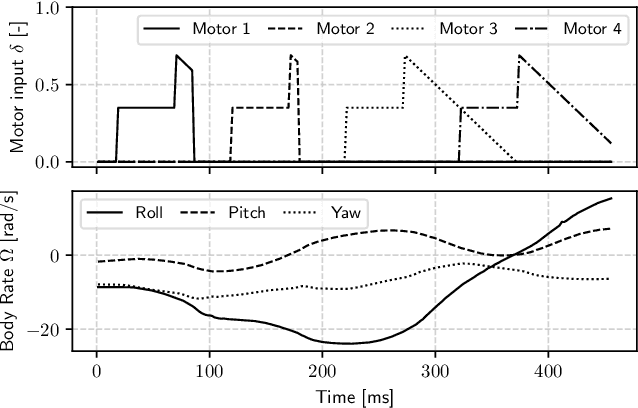
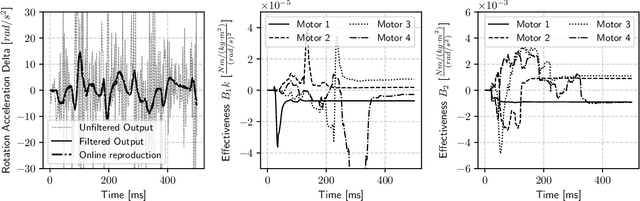
Jun 17, 2024This paper presents a method to recover quadrotor UAV from a throw, when no control parameters are known before the throw. We leverage the availability of high-frequency rotor speed feedback available in racing drone hardware and software to find control effectiveness values and fit a motor model using recursive least squares (RLS) estimation. Furthermore, we propose an excitation sequence that provides large actuation commands while guaranteeing to stay within gyroscope sensing limits. After 450ms of excitation, an INDI attitude controller uses the 52 fitted parameters to arrest rotational motion and recover an upright attitude. Finally, a NDI position controller drives the craft to a position setpoint. The proposed algorithm runs efficiently on microcontrollers found in common UAV flight controllers, and was shown to recover an agile quadrotor every time in 57 live experiments with as low as 3.5m throw height, demonstrating robustness against initial rotations and noise. We also demonstrate control of randomized quadrotors in simulated throws, where the parameter fitting RMS error is typically within 10% of the true value.
AOSoar: Autonomous Orographic Soaring of a Micro Air Vehicle
Aug 01, 2023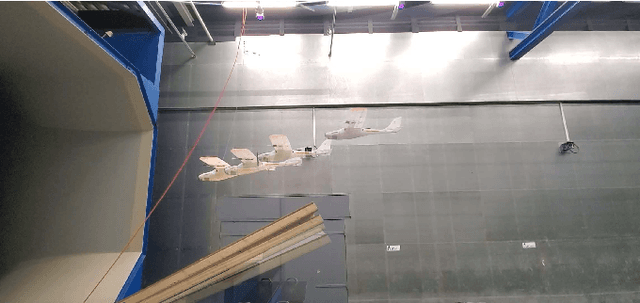
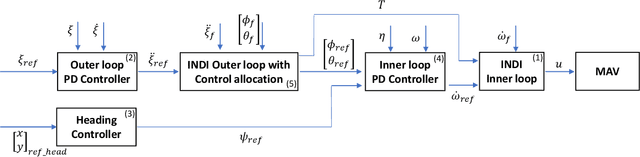
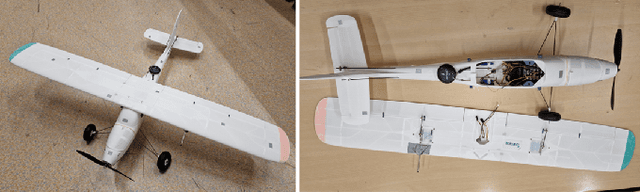
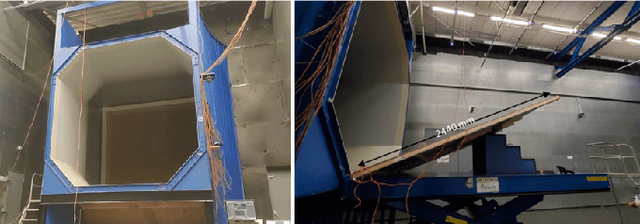
Utilizing wind hovering techniques of soaring birds can save energy expenditure and improve the flight endurance of micro air vehicles (MAVs). Here, we present a novel method for fully autonomous orographic soaring without a priori knowledge of the wind field. Specifically, we devise an Incremental Nonlinear Dynamic Inversion (INDI) controller with control allocation, adapting it for autonomous soaring. This allows for both soaring and the use of the throttle if necessary, without changing any gain or parameter during the flight. Furthermore, we propose a simulated-annealing-based optimization method to search for soaring positions. This enables for the first time an MAV to autonomously find a feasible soaring position while minimizing throttle usage and other control efforts. Autonomous orographic soaring was performed in the wind tunnel. The wind speed and incline of a ramp were changed during the soaring flight. The MAV was able to perform autonomous orographic soaring for flight times of up to 30 minutes. The mean throttle usage was only 0.25% for the entire soaring flight, whereas normal powered flight requires 38%. Also, it was shown that the MAV can find a new soaring spot when the wind field changes during the flight.
Autonomous Control for Orographic Soaring of Fixed-Wing UAVs
May 23, 2023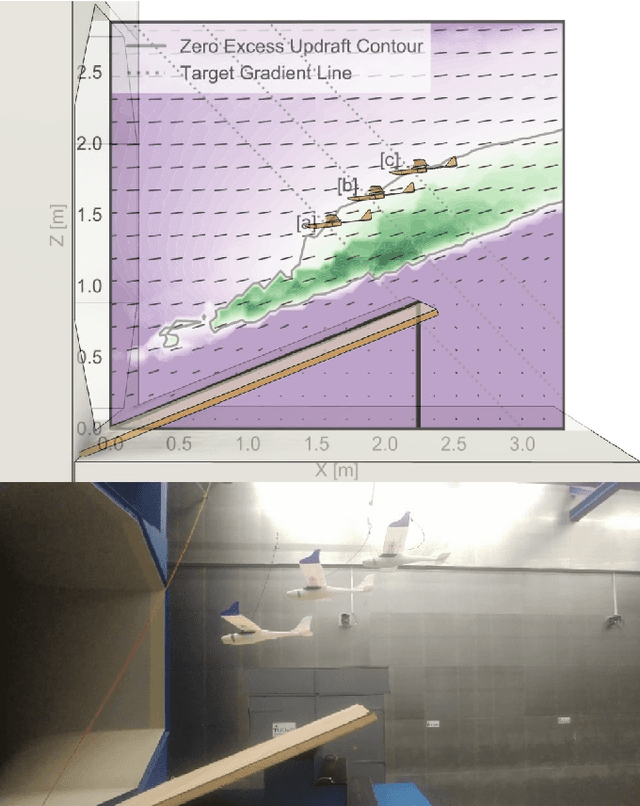
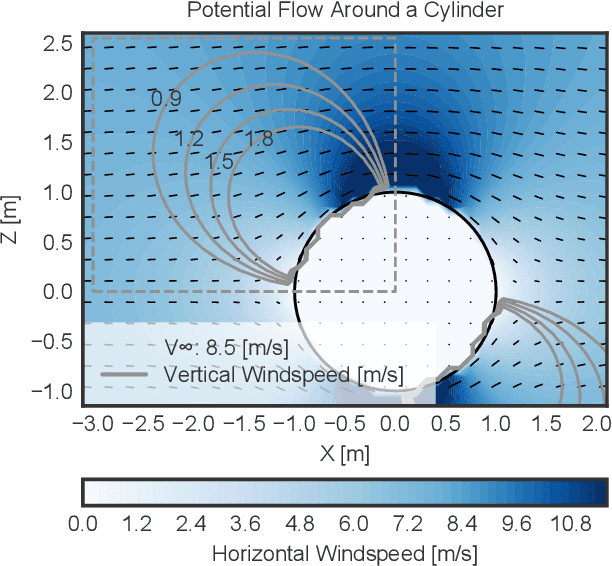
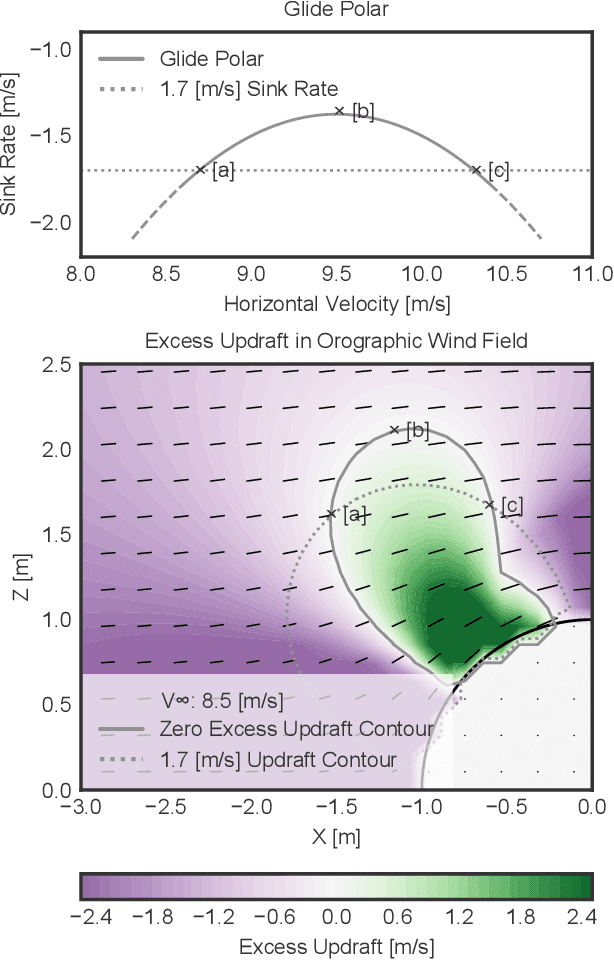
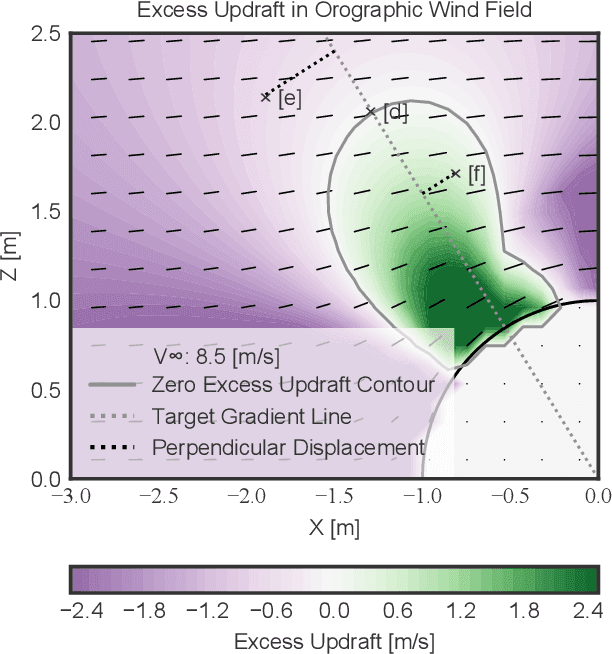
We present a novel controller for fixed-wing UAVs that enables autonomous soaring in an orographic wind field, extending flight endurance. Our method identifies soaring regions and addresses position control challenges by introducing a target gradient line (TGL) on which the UAV achieves an equilibrium soaring position, where sink rate and updraft are balanced. Experimental testing validates the controller's effectiveness in maintaining autonomous soaring flight without using any thrust in a non-static wind field. We also demonstrate a single degree of control freedom in a soaring position through manipulation of the TGL.
First free-flight flow visualisation of a flapping-wing robot
Dec 22, 2016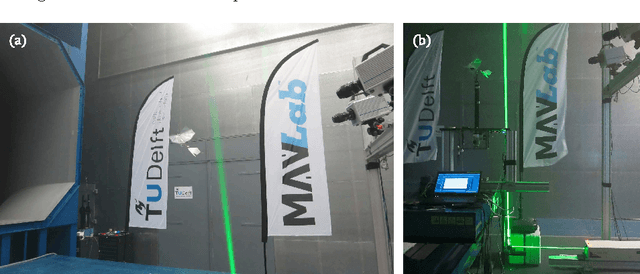
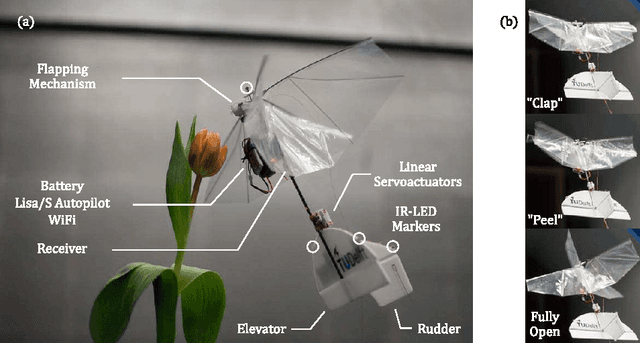
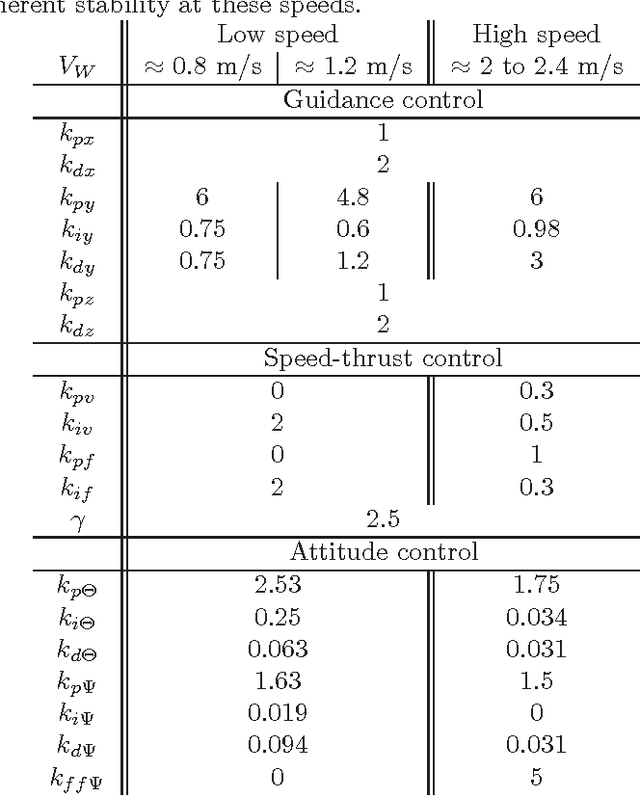
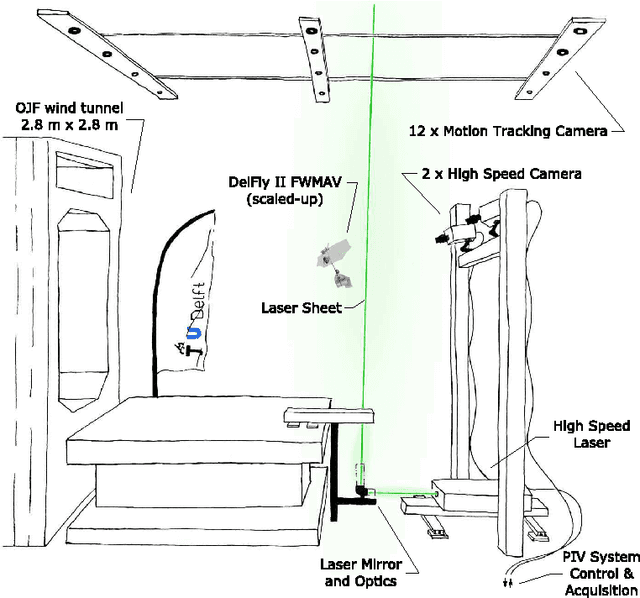
Flow visualisations are essential to better understand the unsteady aerodynamics of flapping wing flight. The issues inherent to animal experiments, such as poor controllability and unnatural flapping when tethered, can be avoided by using robotic flyers. Such an approach holds a promise for a more systematic and repeatable methodology for flow visualisation, through a better controlled flight. Such experiments require high precision position control, however, and until now this was not possible due to the challenging flight dynamics and payload restrictions of flapping wing Micro Air Vehicles (FWMAV). Here, we present a new FWMAV-specific control approach that, by employing an external motion tracking system, achieved autonomous wind tunnel flight with a maximum root-mean-square position error of 28 mm at low speeds (0.8 - 1.2 m/s) and 75 mm at high speeds (2 - 2.4 m/s). This allowed the first free-flight flow visualisation experiments to be conducted with an FWMAV. Time-resolved stereoscopic Particle Image Velocimetry (PIV) was used to reconstruct the 3D flow patterns of the FWMAV wake. A good qualitative match was found in comparison to a tethered configuration at similar conditions, suggesting that the obtained free-flight measurements are reliable and meaningful.