 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly warning signals for loss of control
Dec 24, 2025Maintaining stability in feedback systems, from aircraft and autonomous robots to biological and physiological systems, relies on monitoring their behavior and continuously adjusting their inputs. Incremental damage can make such control fragile. This tends to go unnoticed until a small perturbation induces instability (i.e. loss of control). Traditional methods in the field of engineering rely on accurate system models to compute a safe set of operating instructions, which become invalid when the, possibly damaged, system diverges from its model. Here we demonstrate that the approach of such a feedback system towards instability can nonetheless be monitored through dynamical indicators of resilience. This holistic system safety monitor does not rely on a system model and is based on the generic phenomenon of critical slowing down, shown to occur in the climate, biology and other complex nonlinear systems approaching criticality. Our findings for engineered devices opens up a wide range of applications involving real-time early warning systems as well as an empirical guidance of resilient system design exploration, or "tinkering". While we demonstrate the validity using drones, the generic nature of the underlying principles suggest that these indicators could apply across a wider class of controlled systems including reactors, aircraft, and self-driving cars.
Flying a Quadrotor with Unknown Actuators and Sensor Configuration
Sep 02, 2024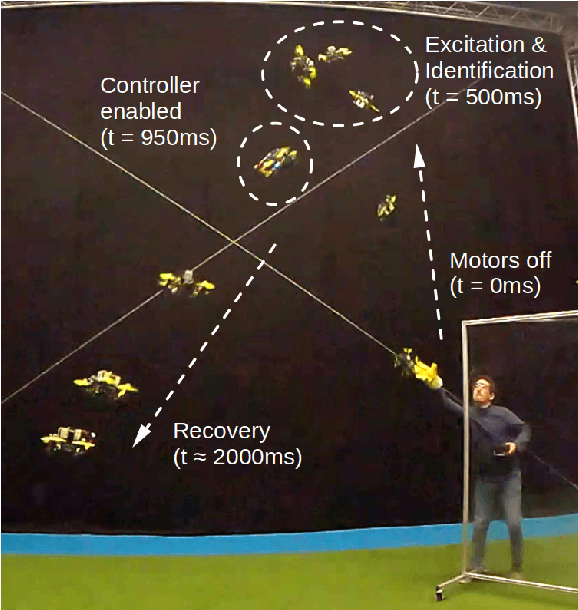
Though control algorithms for multirotor Unmanned Air Vehicle (UAV) are well understood, the configuration, parameter estimation, and tuning of flight control algorithms takes quite some time and resources. In previous work, we have shown that it is possible to identify the control effectiveness and motor dynamics of a multirotor fast enough for it to recover to a stable hover after being thrown 4 meters in the air. In this paper, we extend this to include estimation of the position of the Inertial Measurement Unit (IMU) relative to the Center of Gravity (CoG), estimation of the IMU rotation, the thrust direction of all motors and the optimal combined thrust direction. In order to guarantee a correct IMU position estimation, two prior throw-and-catches of the vehicle with spin around different axes are required. For these throws, a height as low as 1 meter is sufficient. Quadrotor flight experimentation confirms the efficacy of the approach, and a simulation shows its applicability to fully-actuated crafts with multiple possible hover orientations.
Behaviour Trees for Evolutionary Robotics
Aug 07, 2015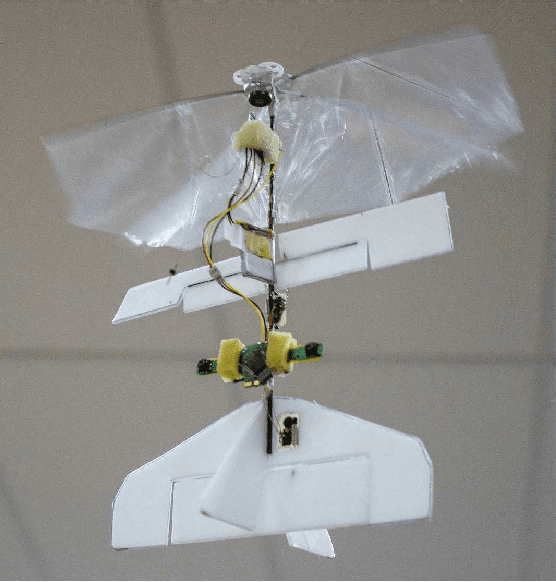
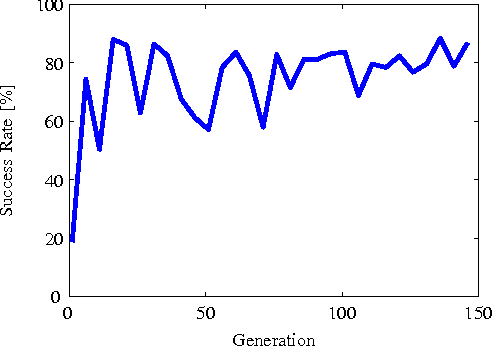
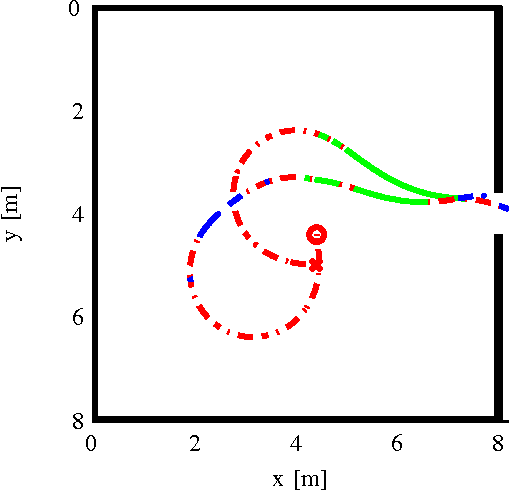
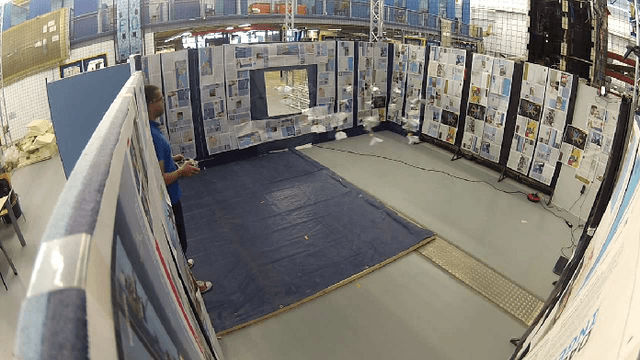
Evolutionary Robotics allows robots with limited sensors and processing to tackle complex tasks by means of sensory-motor coordination. In this paper we show the first application of the Behaviour Tree framework to a real robotic platform using the Evolutionary Robotics methodology. This framework is used to improve the intelligibility of the emergent robotic behaviour as compared to the traditional Neural Network formulation. As a result, the behaviour is easier to comprehend and manually adapt when crossing the reality gap from simulation to reality. This functionality is shown by performing real-world flight tests with the 20-gram DelFly Explorer flapping wing Micro Air Vehicle equipped with a 4-gram onboard stereo vision system. The experiments show that the DelFly can fully autonomously search for and fly through a window with only its onboard sensors and processing. The success rate of the optimised behaviour in simulation is 88% and the corresponding real-world performance is 54% after user adaptation. Although this leaves room for improvement, it is higher than the 46% success rate from a tuned user-defined controller.