 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObstacle Avoidance Strategy using Onboard Stereo Vision on a Flapping Wing MAV
Jan 02, 2017
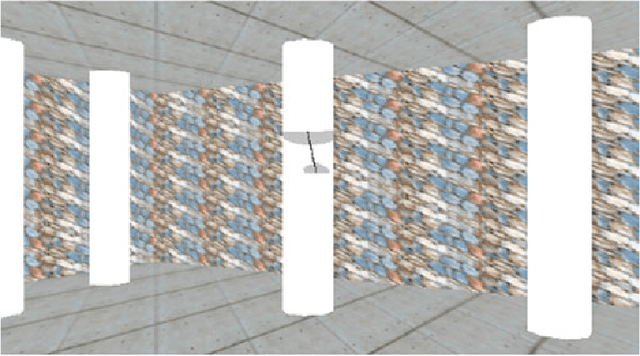
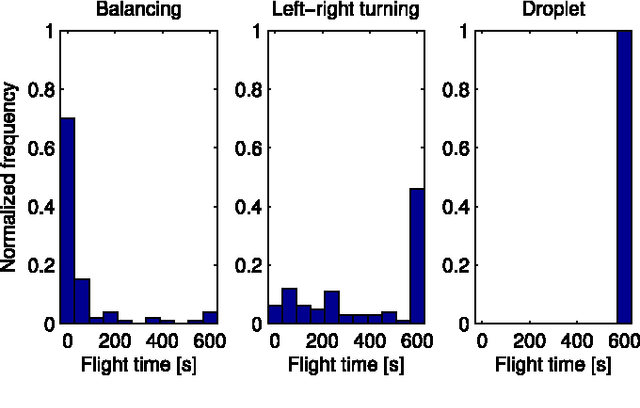
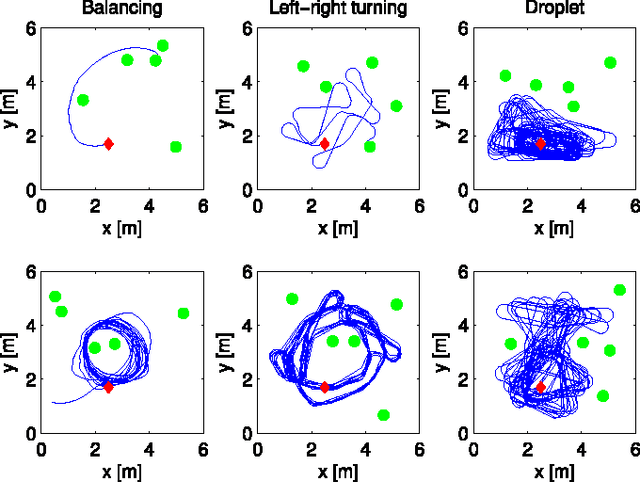
The development of autonomous lightweight MAVs, capable of navigating in unknown indoor environments, is one of the major challenges in robotics. The complexity of this challenge comes from constraints on weight and power consumption of onboard sensing and processing devices. In this paper we propose the "Droplet" strategy, an avoidance strategy based on stereo vision inputs that outperforms reactive avoidance strategies by allowing constant speed maneuvers while being computationally extremely efficient, and which does not need to store previous images or maps. The strategy deals with nonholonomic motion constraints of most fixed and flapping wing platforms, and with the limited field-of-view of stereo camera systems. It guarantees obstacle-free flight in the absence of sensor and motor noise. We first analyze the strategy in simulation, and then show its robustness in real-world conditions by implementing it on a 20-gram flapping wing MAV.
Behaviour Trees for Evolutionary Robotics
Aug 07, 2015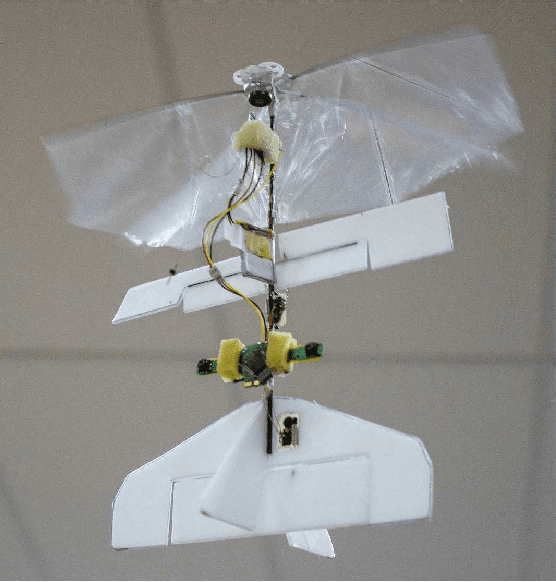
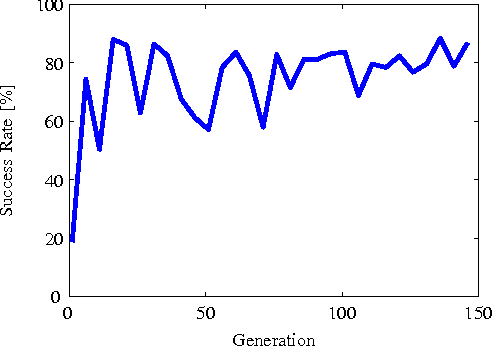
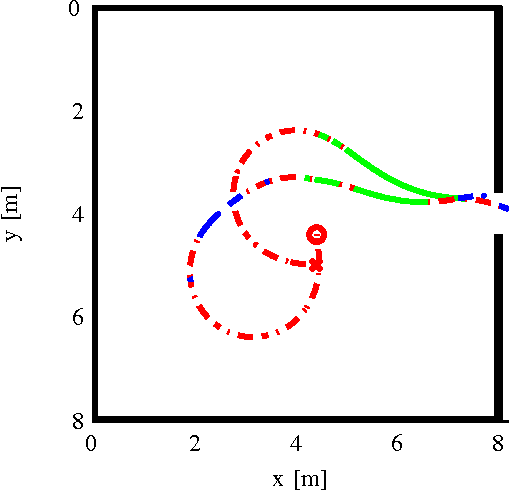
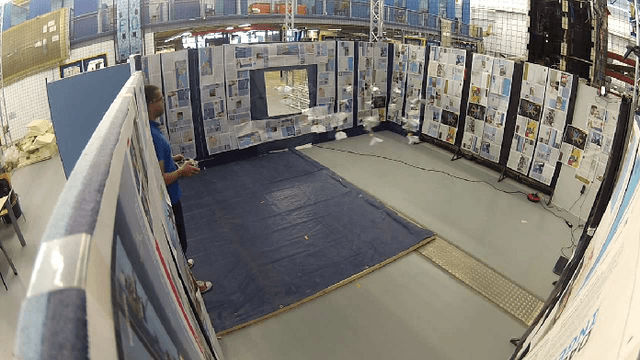
Evolutionary Robotics allows robots with limited sensors and processing to tackle complex tasks by means of sensory-motor coordination. In this paper we show the first application of the Behaviour Tree framework to a real robotic platform using the Evolutionary Robotics methodology. This framework is used to improve the intelligibility of the emergent robotic behaviour as compared to the traditional Neural Network formulation. As a result, the behaviour is easier to comprehend and manually adapt when crossing the reality gap from simulation to reality. This functionality is shown by performing real-world flight tests with the 20-gram DelFly Explorer flapping wing Micro Air Vehicle equipped with a 4-gram onboard stereo vision system. The experiments show that the DelFly can fully autonomously search for and fly through a window with only its onboard sensors and processing. The success rate of the optimised behaviour in simulation is 88% and the corresponding real-world performance is 54% after user adaptation. Although this leaves room for improvement, it is higher than the 46% success rate from a tuned user-defined controller.