 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking the Circle: An Autonomous Control-Switching Strategy for Stable Orographic Soaring in MAVs
Oct 27, 2025Orographic soaring can significantly extend the endurance of micro aerial vehicles (MAVs), but circling behavior, arising from control conflicts between the longitudinal and vertical axes, increases energy consumption and the risk of divergence. We propose a control switching method, named SAOS: Switched Control for Autonomous Orographic Soaring, which mitigates circling behavior by selectively controlling either the horizontal or vertical axis, effectively transforming the system from underactuated to fully actuated during soaring. Additionally, the angle of attack is incorporated into the INDI controller to improve force estimation. Simulations with randomized initial positions and wind tunnel experiments on two MAVs demonstrate that the SAOS improves position convergence, reduces throttle usage, and mitigates roll oscillations caused by pitch-roll coupling. These improvements enhance energy efficiency and flight stability in constrained soaring environments.
The NederDrone: A hybrid lift, hybrid energy hydrogen UAV
Nov 08, 2020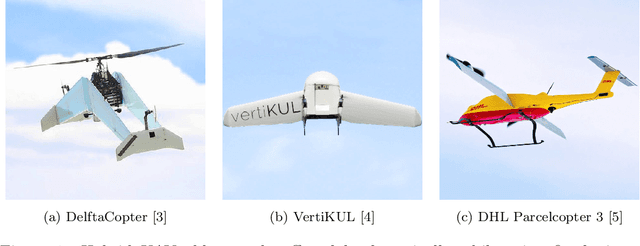
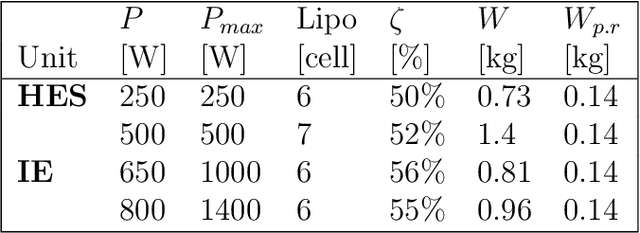
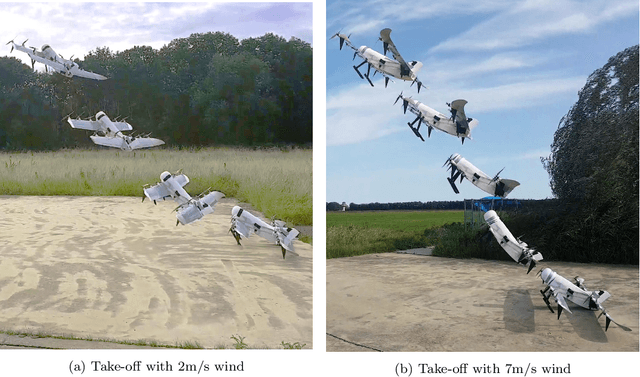
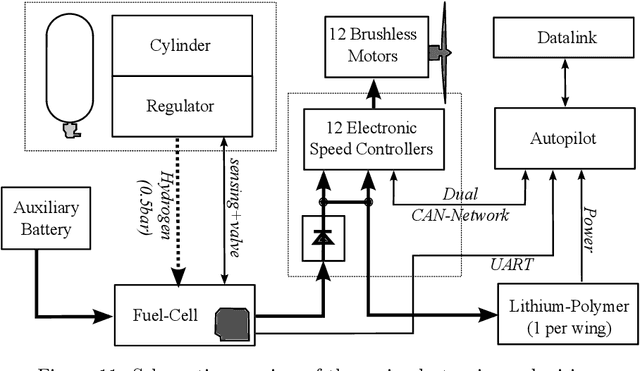
A lot of UAV applications require vertical take-off and landing (VTOL) combined with very long-range or endurance. Transitioning UAVs have been proposed to combine the VTOL capabilities of helicopters with the efficient long-range flight properties of fixed-wing aircraft. But energy is still a bottleneck for many electric long endurance applications. While solar power technology and battery technology have improved a lot, in rougher conditions they still respectively lack the power or total amount of energy required for many real-world situations. In this paper, we introduce the NederDrone, a hybrid lift, hybrid energy hydrogen-powered UAV which can perform vertical take-off and landings using 12 propellers while flying efficiently in forward flight thanks to its fixed wings. The energy is supplied from a mix of hydrogen-driven fuel-cells to store large amounts of energy and battery power for high power situations. The hydrogen is stored in a pressurized cylinder around which the UAV is optimized. This paper analyses the selection of the concept, the implemented safety elements, the electronics and flight control and shows flight data including a 3h38 flight at sea, starting and landing on a small moving ship.
Local Histogram Matching for Efficient Optical Flow Computation Applied to Velocity Estimation on Pocket Drones
Mar 14, 2017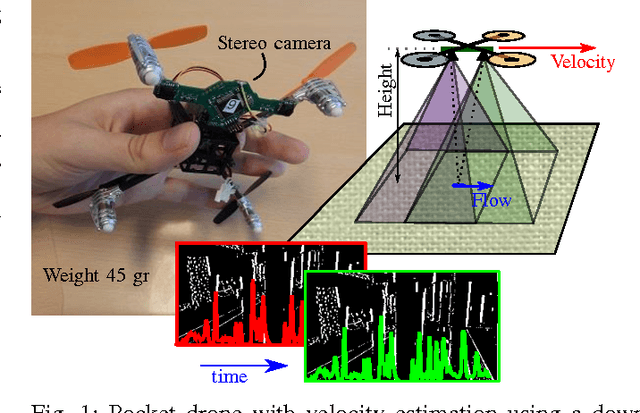
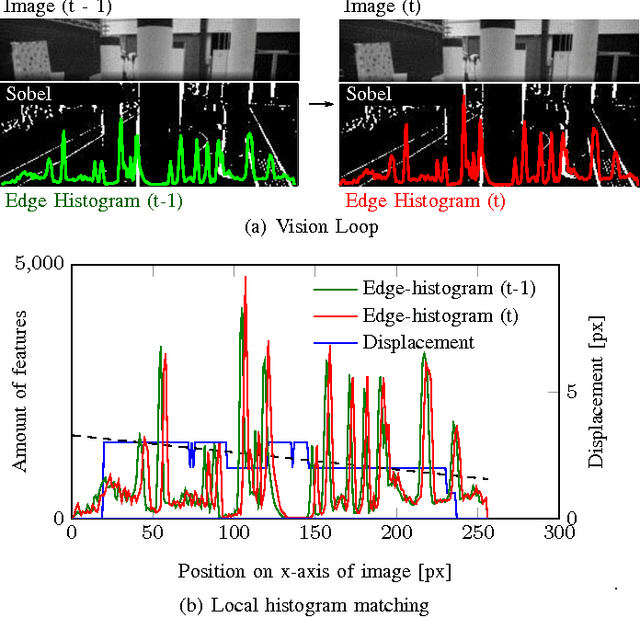
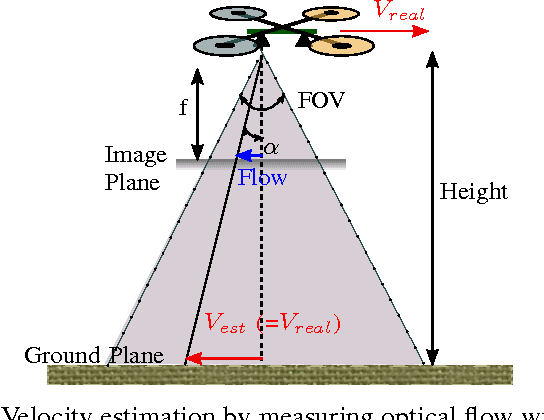
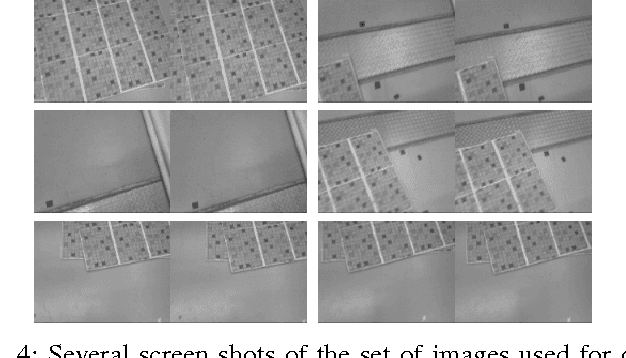
Autonomous flight of pocket drones is challenging due to the severe limitations on on-board energy, sensing, and processing power. However, tiny drones have great potential as their small size allows maneuvering through narrow spaces while their small weight provides significant safety advantages. This paper presents a computationally efficient algorithm for determining optical flow, which can be run on an STM32F4 microprocessor (168 MHz) of a 4 gram stereo-camera. The optical flow algorithm is based on edge histograms. We propose a matching scheme to determine local optical flow. Moreover, the method allows for sub-pixel flow determination based on time horizon adaptation. We demonstrate velocity measurements in flight and use it within a velocity control-loop on a pocket drone.
* 7 pages, 10 figures, Changes: format changed one column to two columns, used url package for links
Design, Control and Visual Navigation of the DelftaCopter
Jan 03, 2017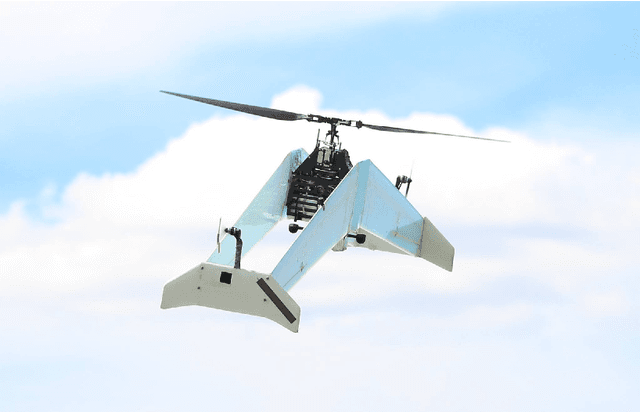
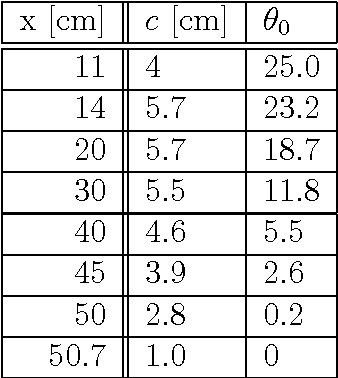
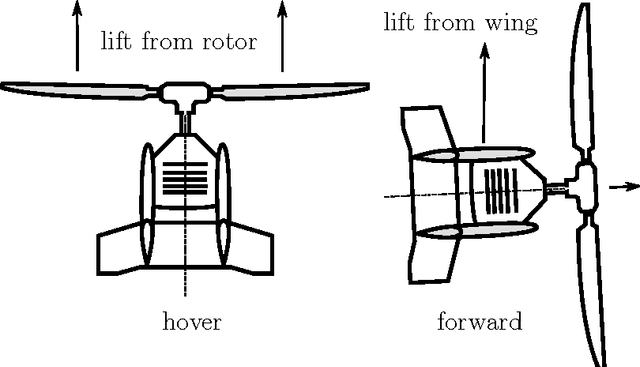
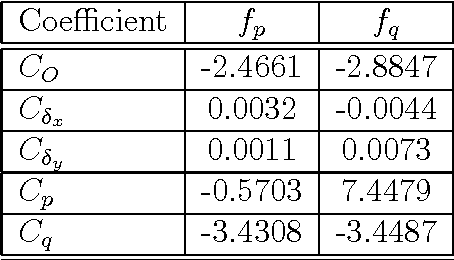
To participate in the Outback Medical Express UAV Challenge 2016, a vehicle was designed and tested that can hover precisely, take-off and land vertically, fly fast forward efficiently and use computer vision to locate a person and a suitable landing location. A rotor blade was designed that can deliver sufficient thrust in hover, while still being efficient in fast forward flight. Energy measurements and windtunnel tests were performed. A rotor-head and corresponding control algorithms were developed to allow transitioning flight with the non-conventional rotor dynamics. Dedicated electronics were designed that meet vehicle needs and regulations to allow safe flight beyond visual line of sight. Vision based search and guidance algorithms were developed and tested. Flight tests and a competition participation illustrate the applicability of the DelftaCopter concept.
Obstacle Avoidance Strategy using Onboard Stereo Vision on a Flapping Wing MAV
Jan 02, 2017
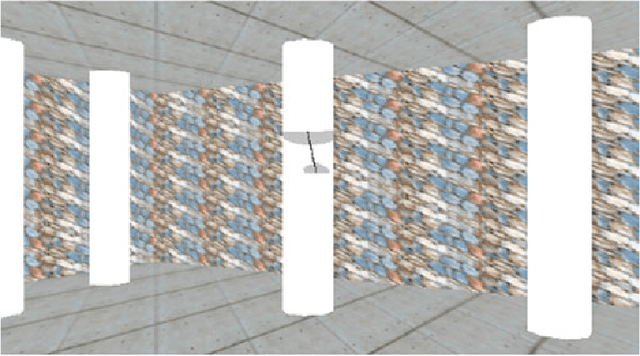
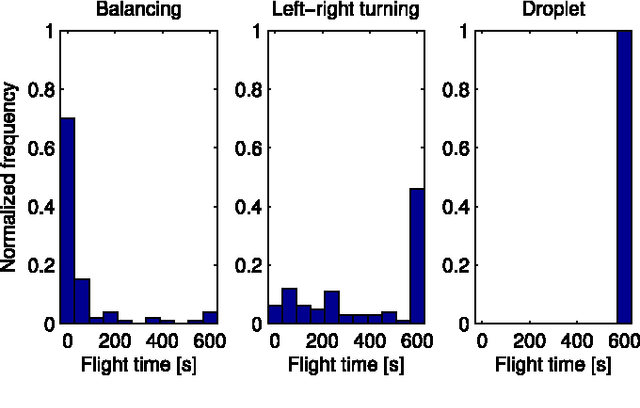
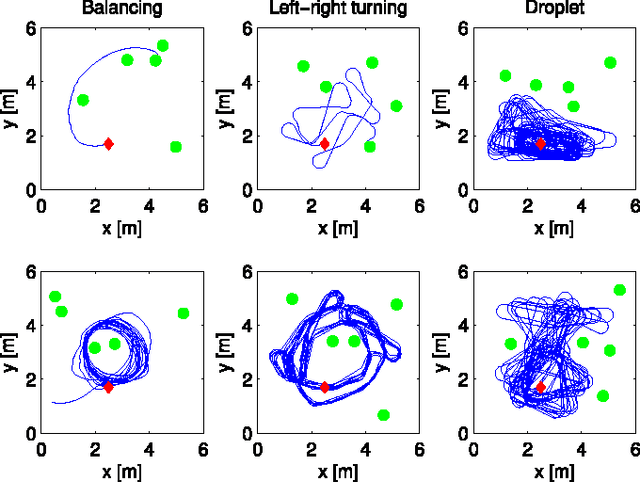
The development of autonomous lightweight MAVs, capable of navigating in unknown indoor environments, is one of the major challenges in robotics. The complexity of this challenge comes from constraints on weight and power consumption of onboard sensing and processing devices. In this paper we propose the "Droplet" strategy, an avoidance strategy based on stereo vision inputs that outperforms reactive avoidance strategies by allowing constant speed maneuvers while being computationally extremely efficient, and which does not need to store previous images or maps. The strategy deals with nonholonomic motion constraints of most fixed and flapping wing platforms, and with the limited field-of-view of stereo camera systems. It guarantees obstacle-free flight in the absence of sensor and motor noise. We first analyze the strategy in simulation, and then show its robustness in real-world conditions by implementing it on a 20-gram flapping wing MAV.