 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe NederDrone: A hybrid lift, hybrid energy hydrogen UAV
Nov 08, 2020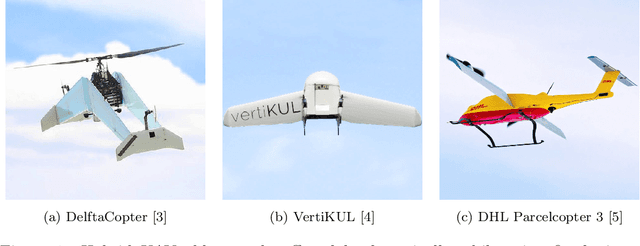
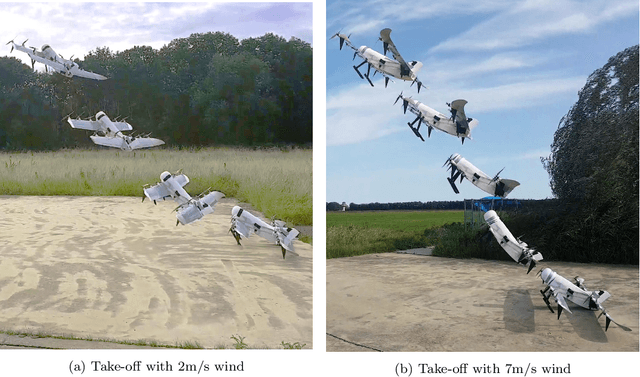
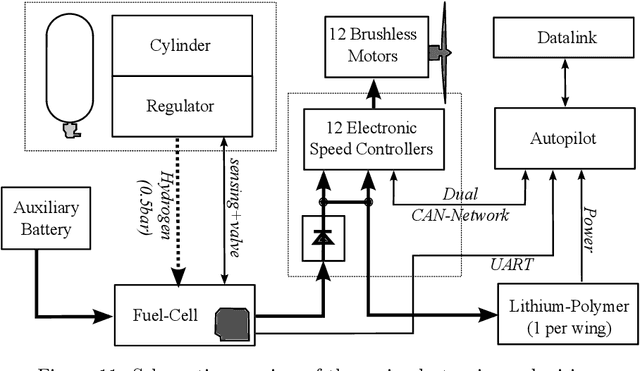
A lot of UAV applications require vertical take-off and landing (VTOL) combined with very long-range or endurance. Transitioning UAVs have been proposed to combine the VTOL capabilities of helicopters with the efficient long-range flight properties of fixed-wing aircraft. But energy is still a bottleneck for many electric long endurance applications. While solar power technology and battery technology have improved a lot, in rougher conditions they still respectively lack the power or total amount of energy required for many real-world situations. In this paper, we introduce the NederDrone, a hybrid lift, hybrid energy hydrogen-powered UAV which can perform vertical take-off and landings using 12 propellers while flying efficiently in forward flight thanks to its fixed wings. The energy is supplied from a mix of hydrogen-driven fuel-cells to store large amounts of energy and battery power for high power situations. The hydrogen is stored in a pressurized cylinder around which the UAV is optimized. This paper analyses the selection of the concept, the implemented safety elements, the electronics and flight control and shows flight data including a 3h38 flight at sea, starting and landing on a small moving ship.
Flexible collaborative transportation by a team of rotorcraft
Feb 01, 2019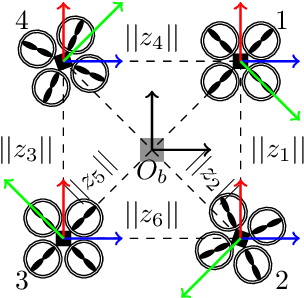
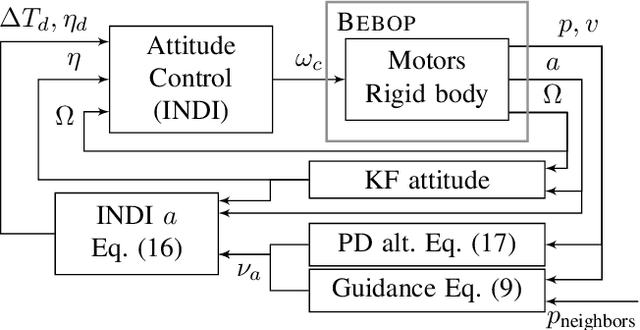

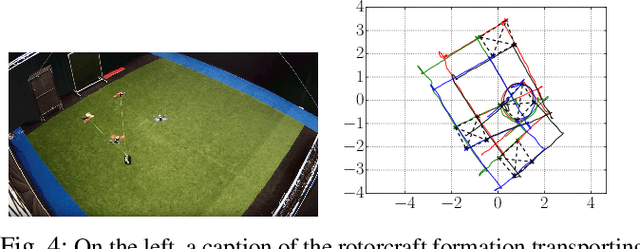
We propose a combined method for the collaborative transportation of a suspended payload by a team of rotorcraft. A recent distance-based formation-motion control algorithm based on assigning distance disagreements among robots generates the acceleration signals to be tracked by the vehicles. In particular, the proposed method does not need global positions nor tracking prescribed trajectories for the motion of the members of the team. The acceleration signals are followed accurately by an Incremental Nonlinear Dynamic Inversion controller designed for rotorcraft that measures and resists the tensions from the payload. Our approach allows us to analyze the involved accelerations and forces in the system so that we can calculate the worst case conditions explicitly to guarantee a nominal performance, provided that the payload starts at rest in the 2D centroid of the formation, and it is not under significant disturbances. For example, we can calculate the maximum safe deformation of the team with respect to its desired shape. We demonstrate our method with a team of four rotorcraft carrying a suspended object two times heavier than the maximum payload for an individual. Last but not least, our proposed algorithm is available for the community in the open-source autopilot Paparazzi.
Design, Control and Visual Navigation of the DelftaCopter
Jan 03, 2017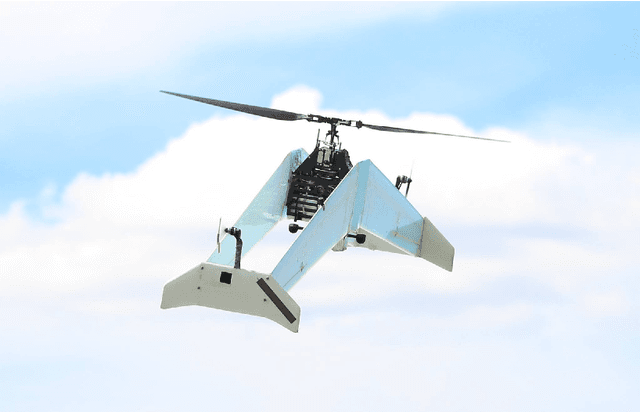
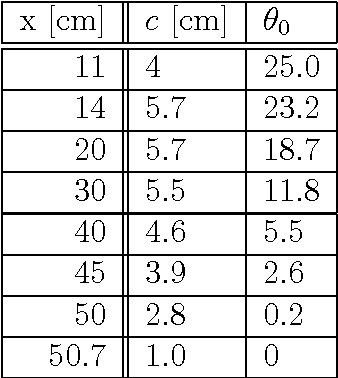
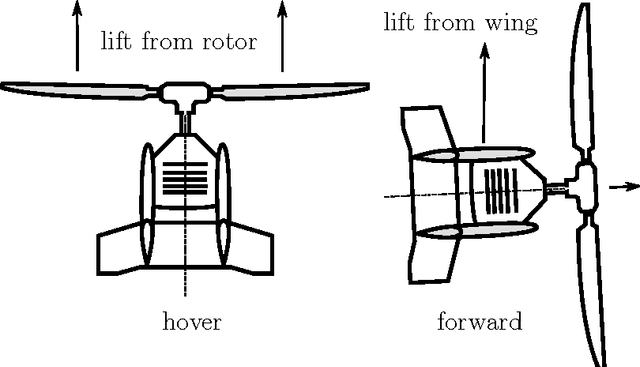
To participate in the Outback Medical Express UAV Challenge 2016, a vehicle was designed and tested that can hover precisely, take-off and land vertically, fly fast forward efficiently and use computer vision to locate a person and a suitable landing location. A rotor blade was designed that can deliver sufficient thrust in hover, while still being efficient in fast forward flight. Energy measurements and windtunnel tests were performed. A rotor-head and corresponding control algorithms were developed to allow transitioning flight with the non-conventional rotor dynamics. Dedicated electronics were designed that meet vehicle needs and regulations to allow safe flight beyond visual line of sight. Vision based search and guidance algorithms were developed and tested. Flight tests and a competition participation illustrate the applicability of the DelftaCopter concept.