 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoRace: Winning Champion-Level Drone Racing with Robust Monocular AI
Jan 21, 2026Autonomous drone racing represents a major frontier in robotics research. It requires an Artificial Intelligence (AI) that can run on board light-weight flying robots under tight resource and time constraints, while pushing the physical system to its limits. The state of the art in this area consists of a system with a stereo camera and an inertial measurement unit (IMU) that beat human drone racing champions in a controlled indoor environment. Here, we present MonoRace: an onboard drone racing approach that uses a monocular, rolling-shutter camera and IMU that generalizes to a competition environment without any external motion tracking system. The approach features robust state estimation that combines neural-network-based gate segmentation with a drone model. Moreover, it includes an offline optimization procedure that leverages the known geometry of gates to refine any state estimation parameter. This offline optimization is based purely on onboard flight data and is important for fine-tuning the vital external camera calibration parameters. Furthermore, the guidance and control are performed by a neural network that foregoes inner loop controllers by directly sending motor commands. This small network runs on the flight controller at 500Hz. The proposed approach won the 2025 Abu Dhabi Autonomous Drone Racing Competition (A2RL), outperforming all competing AI teams and three human world champion pilots in a direct knockout tournament. It set a new milestone in autonomous drone racing research, reaching speeds up to 100 km/h on the competition track and successfully coping with problems such as camera interference and IMU saturation.
Breaking the Circle: An Autonomous Control-Switching Strategy for Stable Orographic Soaring in MAVs
Oct 27, 2025Orographic soaring can significantly extend the endurance of micro aerial vehicles (MAVs), but circling behavior, arising from control conflicts between the longitudinal and vertical axes, increases energy consumption and the risk of divergence. We propose a control switching method, named SAOS: Switched Control for Autonomous Orographic Soaring, which mitigates circling behavior by selectively controlling either the horizontal or vertical axis, effectively transforming the system from underactuated to fully actuated during soaring. Additionally, the angle of attack is incorporated into the INDI controller to improve force estimation. Simulations with randomized initial positions and wind tunnel experiments on two MAVs demonstrate that the SAOS improves position convergence, reduces throttle usage, and mitigates roll oscillations caused by pitch-roll coupling. These improvements enhance energy efficiency and flight stability in constrained soaring environments.
Depth Transfer: Learning to See Like a Simulator for Real-World Drone Navigation
May 18, 2025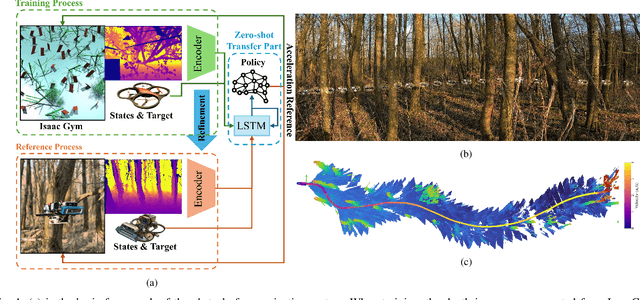
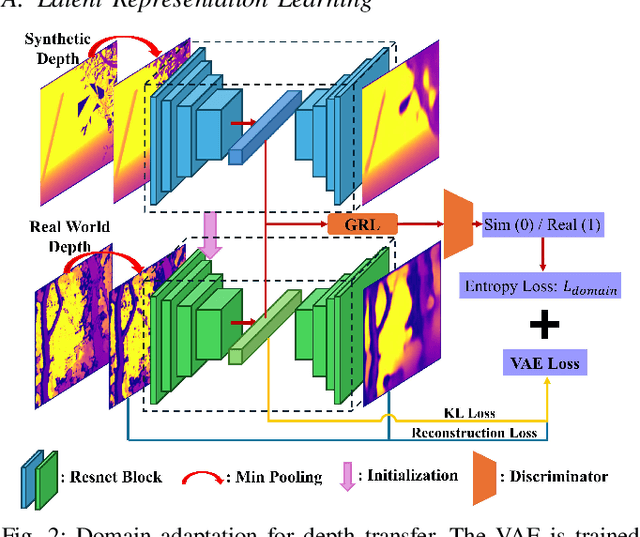
Sim-to-real transfer is a fundamental challenge in robot reinforcement learning. Discrepancies between simulation and reality can significantly impair policy performance, especially if it receives high-dimensional inputs such as dense depth estimates from vision. We propose a novel depth transfer method based on domain adaptation to bridge the visual gap between simulated and real-world depth data. A Variational Autoencoder (VAE) is first trained to encode ground-truth depth images from simulation into a latent space, which serves as input to a reinforcement learning (RL) policy. During deployment, the encoder is refined to align stereo depth images with this latent space, enabling direct policy transfer without fine-tuning. We apply our method to the task of autonomous drone navigation through cluttered environments. Experiments in IsaacGym show that our method nearly doubles the obstacle avoidance success rate when switching from ground-truth to stereo depth input. Furthermore, we demonstrate successful transfer to the photo-realistic simulator AvoidBench using only IsaacGym-generated stereo data, achieving superior performance compared to state-of-the-art baselines. Real-world evaluations in both indoor and outdoor environments confirm the effectiveness of our approach, enabling robust and generalizable depth-based navigation across diverse domains.
One Net to Rule Them All: Domain Randomization in Quadcopter Racing Across Different Platforms
Apr 30, 2025



In high-speed quadcopter racing, finding a single controller that works well across different platforms remains challenging. This work presents the first neural network controller for drone racing that generalizes across physically distinct quadcopters. We demonstrate that a single network, trained with domain randomization, can robustly control various types of quadcopters. The network relies solely on the current state to directly compute motor commands. The effectiveness of this generalized controller is validated through real-world tests on two substantially different crafts (3-inch and 5-inch race quadcopters). We further compare the performance of this generalized controller with controllers specifically trained for the 3-inch and 5-inch drone, using their identified model parameters with varying levels of domain randomization (0%, 10%, 20%, 30%). While the generalized controller shows slightly slower speeds compared to the fine-tuned models, it excels in adaptability across different platforms. Our results show that no randomization fails sim-to-real transfer while increasing randomization improves robustness but reduces speed. Despite this trade-off, our findings highlight the potential of domain randomization for generalizing controllers, paving the way for universal AI controllers that can adapt to any platform.
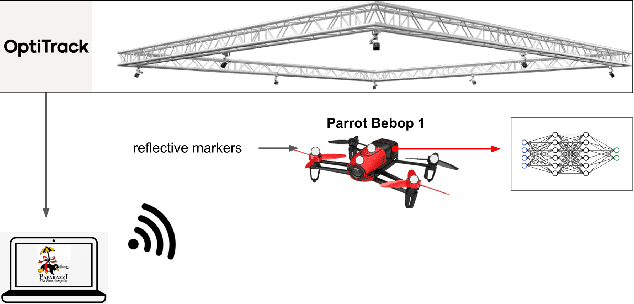
Self-Supervised Monocular Visual Drone Model Identification through Improved Occlusion Handling
Apr 30, 2025


Ego-motion estimation is vital for drones when flying in GPS-denied environments. Vision-based methods struggle when flight speed increases and close-by objects lead to difficult visual conditions with considerable motion blur and large occlusions. To tackle this, vision is typically complemented by state estimation filters that combine a drone model with inertial measurements. However, these drone models are currently learned in a supervised manner with ground-truth data from external motion capture systems, limiting scalability to different environments and drones. In this work, we propose a self-supervised learning scheme to train a neural-network-based drone model using only onboard monocular video and flight controller data (IMU and motor feedback). We achieve this by first training a self-supervised relative pose estimation model, which then serves as a teacher for the drone model. To allow this to work at high speed close to obstacles, we propose an improved occlusion handling method for training self-supervised pose estimation models. Due to this method, the root mean squared error of resulting odometry estimates is reduced by an average of 15%. Moreover, the student neural drone model can be successfully obtained from the onboard data. It even becomes more accurate at higher speeds compared to its teacher, the self-supervised vision-based model. We demonstrate the value of the neural drone model by integrating it into a traditional filter-based VIO system (ROVIO), resulting in superior odometry accuracy on aggressive 3D racing trajectories near obstacles. Self-supervised learning of ego-motion estimation represents a significant step toward bridging the gap between flying in controlled, expensive lab environments and real-world drone applications. The fusion of vision and drone models will enable higher-speed flight and improve state estimation, on any drone in any environment.
Multi-objective Evolution of Drone Morphology
Feb 03, 2025



The design of multicopter drones has remained almost the same since its inception. While conventional designs, such as the quadcopter, work well in many cases, they may not be optimal in specific environments or missions. This paper revisits rotary drone design by exploring which body morphologies are optimal for different objectives and constraints. Specifically, an evolutionary algorithm is used to produce optimal drone morphologies for three objectives: (1) high thrust-to-weight ratio, (2) high maneuverability, and (3) small size. To generate a range of optimal drones with performance trade-offs between them, the non-dominated sorting genetic algorithm II, or NSGA-II is used. A randomly sampled population of 600 is evolved over 2000 generations. The NSGA-II algorithm evolved drone bodies that outperform a standard 5-inch 220 mm wheelbase quadcopter in at least one of the three objectives. The three extrema in the Pareto front show improvement of 487.8%, 23.5% and 4.8% in maneuverability, thrust-to-weight ratio and size, respectively. The improvement in maneuverability can be attributed to the tilt angles of the propellers, while the increase in thrust-to-weight ratio is primarily due to the higher number of propellers. The quadcopter is located on the Pareto front for the three objectives. However, our results also show that other designs can be better depending on the objectives.
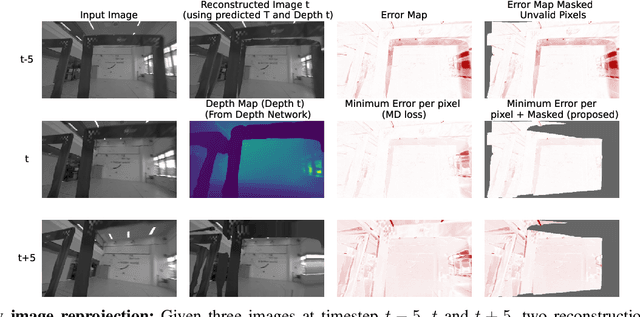
MAVRL: Learn to Fly in Cluttered Environments with Varying Speed
Feb 13, 2024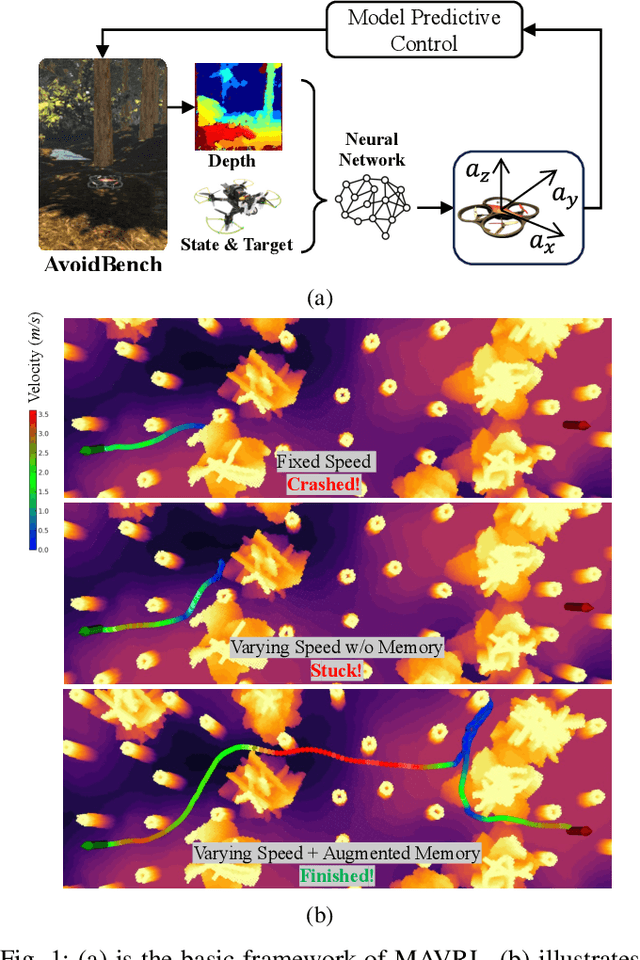
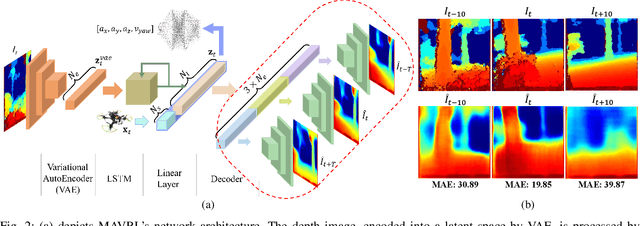
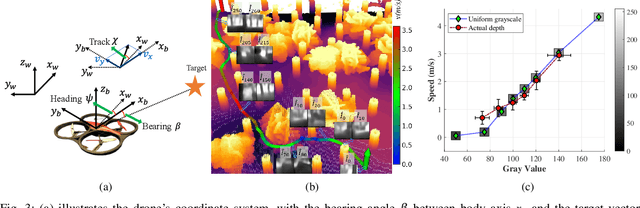
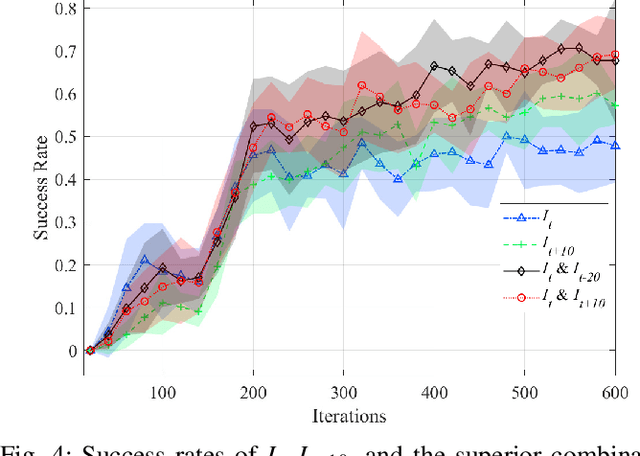
Many existing obstacle avoidance algorithms overlook the crucial balance between safety and agility, especially in environments of varying complexity. In our study, we introduce an obstacle avoidance pipeline based on reinforcement learning. This pipeline enables drones to adapt their flying speed according to the environmental complexity. Moreover, to improve the obstacle avoidance performance in cluttered environments, we propose a novel latent space. The latent space in this representation is explicitly trained to retain memory of previous depth map observations. Our findings confirm that varying speed leads to a superior balance of success rate and agility in cluttered environments. Additionally, our memory-augmented latent representation outperforms the latent representation commonly used in reinforcement learning. Finally, after minimal fine-tuning, we successfully deployed our network on a real drone for enhanced obstacle avoidance.
End-to-end Reinforcement Learning for Time-Optimal Quadcopter Flight
Nov 28, 2023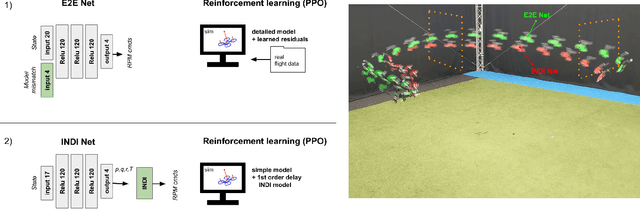
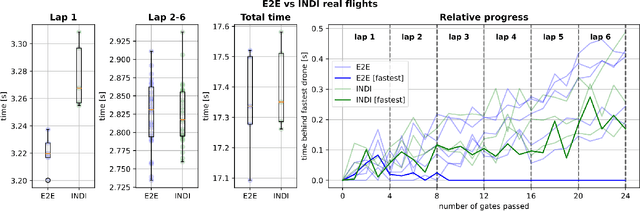
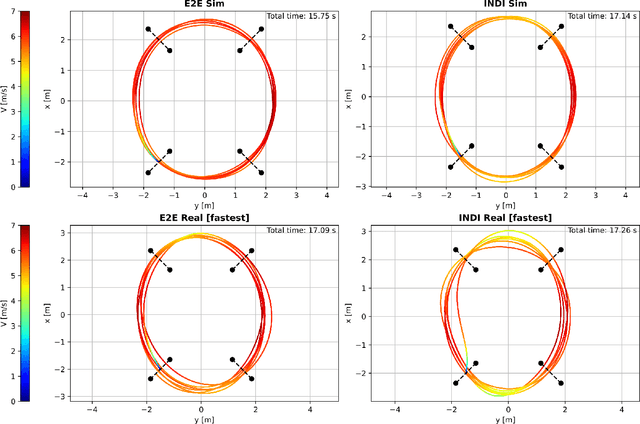
Aggressive time-optimal control of quadcopters poses a significant challenge in the field of robotics. The state-of-the-art approach leverages reinforcement learning (RL) to train optimal neural policies. However, a critical hurdle is the sim-to-real gap, often addressed by employing a robust inner loop controller -an abstraction that, in theory, constrains the optimality of the trained controller, necessitating margins to counter potential disturbances. In contrast, our novel approach introduces high-speed quadcopter control using end-to-end RL (E2E) that gives direct motor commands. To bridge the reality gap, we incorporate a learned residual model and an adaptive method that can compensate for modeling errors in thrust and moments. We compare our E2E approach against a state-of-the-art network that commands thrust and body rates to an INDI inner loop controller, both in simulated and real-world flight. E2E showcases a significant 1.39-second advantage in simulation and a 0.17-second edge in real-world testing, highlighting end-to-end reinforcement learning's potential. The performance drop observed from simulation to reality shows potential for further improvement, including refining strategies to address the reality gap or exploring offline reinforcement learning with real flight data.
Optimality Principles in Spacecraft Neural Guidance and Control
May 22, 2023Spacecraft and drones aimed at exploring our solar system are designed to operate in conditions where the smart use of onboard resources is vital to the success or failure of the mission. Sensorimotor actions are thus often derived from high-level, quantifiable, optimality principles assigned to each task, utilizing consolidated tools in optimal control theory. The planned actions are derived on the ground and transferred onboard where controllers have the task of tracking the uploaded guidance profile. Here we argue that end-to-end neural guidance and control architectures (here called G&CNets) allow transferring onboard the burden of acting upon these optimality principles. In this way, the sensor information is transformed in real time into optimal plans thus increasing the mission autonomy and robustness. We discuss the main results obtained in training such neural architectures in simulation for interplanetary transfers, landings and close proximity operations, highlighting the successful learning of optimality principles by the neural model. We then suggest drone racing as an ideal gym environment to test these architectures on real robotic platforms, thus increasing confidence in their utilization on future space exploration missions. Drone racing shares with spacecraft missions both limited onboard computational capabilities and similar control structures induced from the optimality principle sought, but it also entails different levels of uncertainties and unmodelled effects. Furthermore, the success of G&CNets on extremely resource-restricted drones illustrates their potential to bring real-time optimal control within reach of a wider variety of robotic systems, both in space and on Earth.
Guidance & Control Networks for Time-Optimal Quadcopter Flight
May 04, 2023



Reaching fast and autonomous flight requires computationally efficient and robust algorithms. To this end, we train Guidance & Control Networks to approximate optimal control policies ranging from energy-optimal to time-optimal flight. We show that the policies become more difficult to learn the closer we get to the time-optimal 'bang-bang' control profile. We also assess the importance of knowing the maximum angular rotor velocity of the quadcopter and show that over- or underestimating this limit leads to less robust flight. We propose an algorithm to identify the current maximum angular rotor velocity onboard and a network that adapts its policy based on the identified limit. Finally, we extend previous work on Guidance & Control Networks by learning to take consecutive waypoints into account. We fly a 4x3m track in similar lap times as the differential-flatness-based minimum snap benchmark controller while benefiting from the flexibility that Guidance & Control Networks offer.