 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy efficiency analysis of Spiking Neural Networks for space applications
May 16, 2025While the exponential growth of the space sector and new operative concepts ask for higher spacecraft autonomy, the development of AI-assisted space systems was so far hindered by the low availability of power and energy typical of space applications. In this context, Spiking Neural Networks (SNN) are highly attractive due to their theoretically superior energy efficiency due to their inherently sparse activity induced by neurons communicating by means of binary spikes. Nevertheless, the ability of SNN to reach such efficiency on real world tasks is still to be demonstrated in practice. To evaluate the feasibility of utilizing SNN onboard spacecraft, this work presents a numerical analysis and comparison of different SNN techniques applied to scene classification for the EuroSAT dataset. Such tasks are of primary importance for space applications and constitute a valuable test case given the abundance of competitive methods available to establish a benchmark. Particular emphasis is placed on models based on temporal coding, where crucial information is encoded in the timing of neuron spikes. These models promise even greater efficiency of resulting networks, as they maximize the sparsity properties inherent in SNN. A reliable metric capable of comparing different architectures in a hardware-agnostic way is developed to establish a clear theoretical dependence between architecture parameters and the energy consumption that can be expected onboard the spacecraft. The potential of this novel method and his flexibility to describe specific hardware platforms is demonstrated by its application to predicting the energy consumption of a BrainChip Akida AKD1000 neuromorphic processor.
EclipseNETs: Learning Irregular Small Celestial Body Silhouettes
Apr 06, 2025Accurately predicting eclipse events around irregular small bodies is crucial for spacecraft navigation, orbit determination, and spacecraft systems management. This paper introduces a novel approach leveraging neural implicit representations to model eclipse conditions efficiently and reliably. We propose neural network architectures that capture the complex silhouettes of asteroids and comets with high precision. Tested on four well-characterized bodies - Bennu, Itokawa, 67P/Churyumov-Gerasimenko, and Eros - our method achieves accuracy comparable to traditional ray-tracing techniques while offering orders of magnitude faster performance. Additionally, we develop an indirect learning framework that trains these models directly from sparse trajectory data using Neural Ordinary Differential Equations, removing the requirement to have prior knowledge of an accurate shape model. This approach allows for the continuous refinement of eclipse predictions, progressively reducing errors and improving accuracy as new trajectory data is incorporated.
Continuous Design and Reprogramming of Totimorphic Structures for Space Applications
Nov 22, 2024



Recently, a class of mechanical lattices with reconfigurable, zero-stiffness structures has been proposed, called Totimorphic structures. In this work, we introduce a computational framework that allows continuous reprogramming of a Totimorphic lattice's effective properties, such as mechanical and optical properties, via continuous geometric changes alone. Our approach is differentiable and guarantees valid Totimorphic lattice configurations throughout the optimisation process, thus providing not only specific configurations with desired properties but also trajectories through configuration space connecting them. It enables re-programmable structures where actuators are controlled via automatic differentiation on an objective-dependent cost function, altering the lattice structure at all times to achieve a given objective - which is interchangeable to achieve different functionalities. Our main interest lies in deep space applications where harsh, extreme, and resource-constrained environments demand solutions that offer flexibility, resource efficiency, and autonomy. We illustrate our framework through two proofs of concept: a re-programmable metamaterial as well as a space telescope mirror with adjustable focal length, both made from Totimorphic structures. The introduced framework is easily adjustable to a variety of Totimorphic designs and objectives, providing a light-weight model for endowing physical prototypes of Totimorphic structures with autonomous self-configuration and self-repair capabilities.
Asteroid Mining: ACT&Friends' Results for the GTOC 12 Problem
Oct 28, 2024In 2023, the 12th edition of Global Trajectory Competition was organised around the problem referred to as "Sustainable Asteroid Mining". This paper reports the developments that led to the solution proposed by ESA's Advanced Concepts Team. Beyond the fact that the proposed approach failed to rank higher than fourth in the final competition leader-board, several innovative fundamental methodologies were developed which have a broader application. In particular, new methods based on machine learning as well as on manipulating the fundamental laws of astrodynamics were developed and able to fill with remarkable accuracy the gap between full low-thrust trajectories and their representation as impulsive Lambert transfers. A novel technique was devised to formulate the challenge of optimal subset selection from a repository of pre-existing optimal mining trajectories as an integer linear programming problem. Finally, the fundamental problem of searching for single optimal mining trajectories (mining and collecting all resources), albeit ignoring the possibility of having intra-ship collaboration and thus sub-optimal in the case of the GTOC12 problem, was efficiently solved by means of a novel search based on a look-ahead score and thus making sure to select asteroids that had chances to be re-visited later on.
EclipseNETs: a differentiable description of irregular eclipse conditions
Aug 09, 2024In the field of spaceflight mechanics and astrodynamics, determining eclipse regions is a frequent and critical challenge. This determination impacts various factors, including the acceleration induced by solar radiation pressure, the spacecraft power input, and its thermal state all of which must be accounted for in various phases of the mission design. This study leverages recent advances in neural image processing to develop fully differentiable models of eclipse regions for highly irregular celestial bodies. By utilizing test cases involving Solar System bodies previously visited by spacecraft, such as 433 Eros, 25143 Itokawa, 67P/Churyumov--Gerasimenko, and 101955 Bennu, we propose and study an implicit neural architecture defining the shape of the eclipse cone based on the Sun's direction. Employing periodic activation functions, we achieve high precision in modeling eclipse conditions. Furthermore, we discuss the potential applications of these differentiable models in spaceflight mechanics computations.
NeuralODEs for VLEO simulations: Introducing thermoNET for Thermosphere Modeling
May 29, 2024We introduce a novel neural architecture termed thermoNET, designed to represent thermospheric density in satellite orbital propagation using a reduced amount of differentiable computations. Due to the appearance of a neural network on the right-hand side of the equations of motion, the resulting satellite dynamics is governed by a NeuralODE, a neural Ordinary Differential Equation, characterized by its fully differentiable nature, allowing the derivation of variational equations (hence of the state transition matrix) and facilitating its use in connection to advanced numerical techniques such as Taylor-based numerical propagation and differential algebraic techniques. Efficient training of the network parameters occurs through two distinct approaches. In the first approach, the network undergoes training independently of spacecraft dynamics, engaging in a pure regression task against ground truth models, including JB-08 and NRLMSISE-00. In the second paradigm, network parameters are learned based on observed dynamics, adapting through ODE sensitivities. In both cases, the outcome is a flexible, compact model of the thermosphere density greatly enhancing numerical propagation efficiency while maintaining accuracy in the orbital predictions.
Computing low-thrust transfers in the asteroid belt, a comparison between astrodynamical manipulations and a machine learning approach
May 29, 2024


Low-thrust trajectories play a crucial role in optimizing scientific output and cost efficiency in asteroid belt missions. Unlike high-thrust transfers, low-thrust trajectories require solving complex optimal control problems. This complexity grows exponentially with the number of asteroids visited due to orbital mechanics intricacies. In the literature, methods for approximating low-thrust transfers without full optimization have been proposed, including analytical and machine learning techniques. In this work, we propose new analytical approximations and compare their accuracy and performance to machine learning methods. While analytical approximations leverage orbit theory to estimate trajectory costs, machine learning employs a more black-box approach, utilizing neural networks to predict optimal transfers based on various attributes. We build a dataset of about 3 million transfers, found by solving the time and fuel optimal control problems, for different time of flights, which we also release open-source. Comparison between the two methods on this database reveals the superiority of machine learning, especially for longer transfers. Despite challenges such as multi revolution transfers, both approaches maintain accuracy within a few percent in the final mass errors, on a database of trajectories involving numerous asteroids. This work contributes to the efficient exploration of mission opportunities in the asteroid belt, providing insights into the strengths and limitations of different approximation strategies.
Guidance and Control Networks with Periodic Activation Functions
May 28, 2024Inspired by the versatility of sinusoidal representation networks (SIRENs), we present a modified Guidance & Control Networks (G&CNETs) variant using periodic activation functions in the hidden layers. We demonstrate that the resulting G&CNETs train faster and achieve a lower overall training error on three different control scenarios on which G&CNETs have been tested previously. A preliminary analysis is presented in an attempt to explain the superior performance of the SIREN architecture for the particular types of tasks that G&CNETs excel on.
Closing the gap: Optimizing Guidance and Control Networks through Neural ODEs
Apr 25, 2024We improve the accuracy of Guidance & Control Networks (G&CNETs), trained to represent the optimal control policies of a time-optimal transfer and a mass-optimal landing, respectively. In both cases we leverage the dynamics of the spacecraft, described by Ordinary Differential Equations which incorporate a neural network on their right-hand side (Neural ODEs). Since the neural dynamics is differentiable, the ODEs sensitivities to the network parameters can be computed using the variational equations, thereby allowing to update the G&CNET parameters based on the observed dynamics. We start with a straightforward regression task, training the G&CNETs on datasets of optimal trajectories using behavioural cloning. These networks are then refined using the Neural ODE sensitivities by minimizing the error between the final states and the target states. We demonstrate that for the orbital transfer, the final error to the target can be reduced by 99% on a single trajectory and by 70% on a batch of 500 trajectories. For the landing problem the reduction in error is around 98-99% (position) and 40-44% (velocity). This step significantly enhances the accuracy of G&CNETs, which instills greater confidence in their reliability for operational use. We also compare our results to the popular Dataset Aggregation method (DaGGER) and allude to the strengths and weaknesses of both methods.
Closing the Gap Between SGP4 and High-Precision Propagation via Differentiable Programming
Feb 26, 2024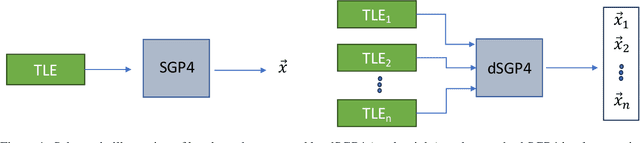
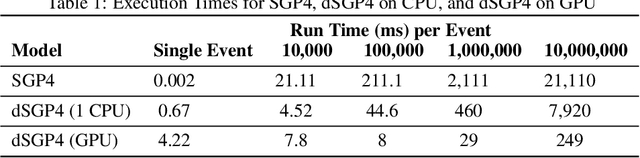
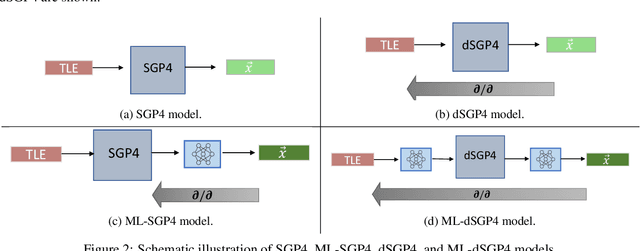
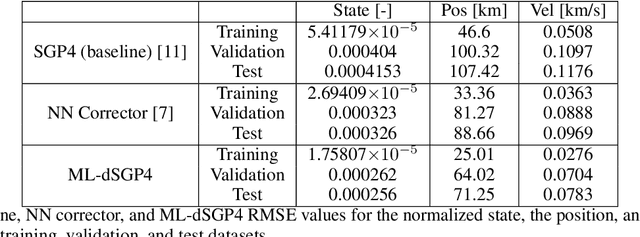
The Simplified General Perturbations 4 (SGP4) orbital propagation method is widely used for predicting the positions and velocities of Earth-orbiting objects rapidly and reliably. Despite continuous refinement, SGP models still lack the precision of numerical propagators, which offer significantly smaller errors. This study presents dSGP4, a novel differentiable version of SGP4 implemented using PyTorch. By making SGP4 differentiable, dSGP4 facilitates various space-related applications, including spacecraft orbit determination, state conversion, covariance transformation, state transition matrix computation, and covariance propagation. Additionally, dSGP4's PyTorch implementation allows for embarrassingly parallel orbital propagation across batches of Two-Line Element Sets (TLEs), leveraging the computational power of CPUs, GPUs, and advanced hardware for distributed prediction of satellite positions at future times. Furthermore, dSGP4's differentiability enables integration with modern machine learning techniques. Thus, we propose a novel orbital propagation paradigm, ML-dSGP4, where neural networks are integrated into the orbital propagator. Through stochastic gradient descent, this combined model's inputs, outputs, and parameters can be iteratively refined, surpassing SGP4's precision. Neural networks act as identity operators by default, adhering to SGP4's behavior. However, dSGP4's differentiability allows fine-tuning with ephemeris data, enhancing precision while maintaining computational speed. This empowers satellite operators and researchers to train the model using specific ephemeris or high-precision numerical propagation data, significantly advancing orbital prediction capabilities.