 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAVRL: Learn to Fly in Cluttered Environments with Varying Speed
Paper and Code
Feb 13, 2024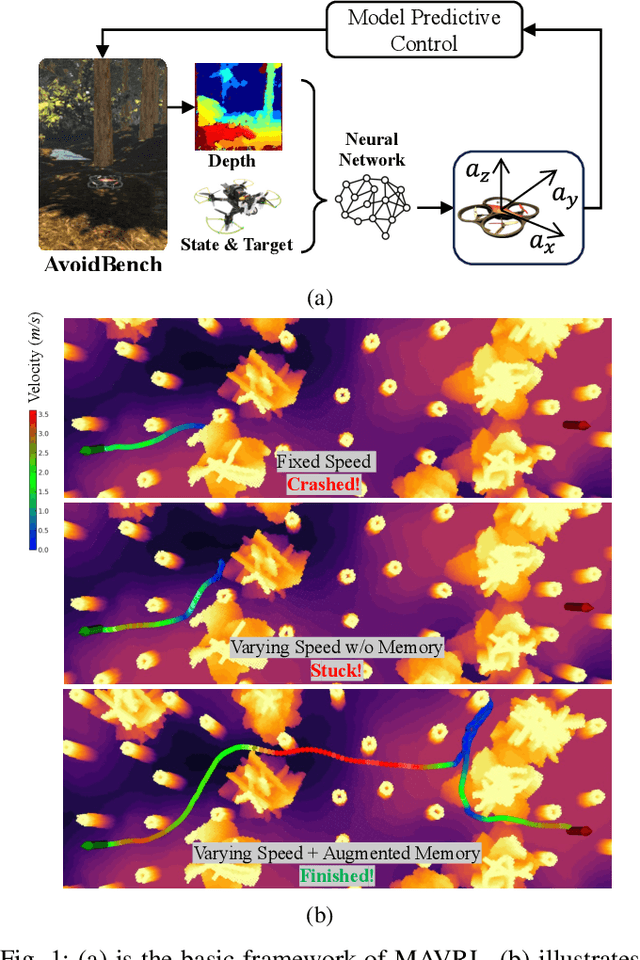
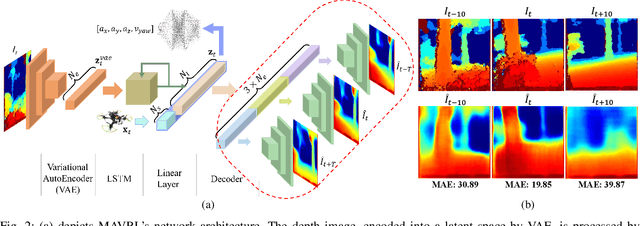
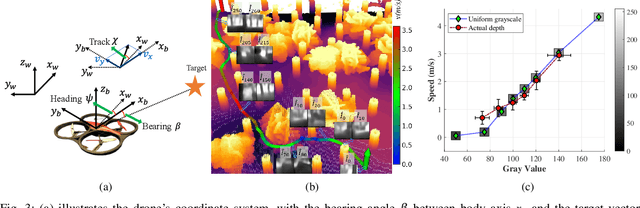
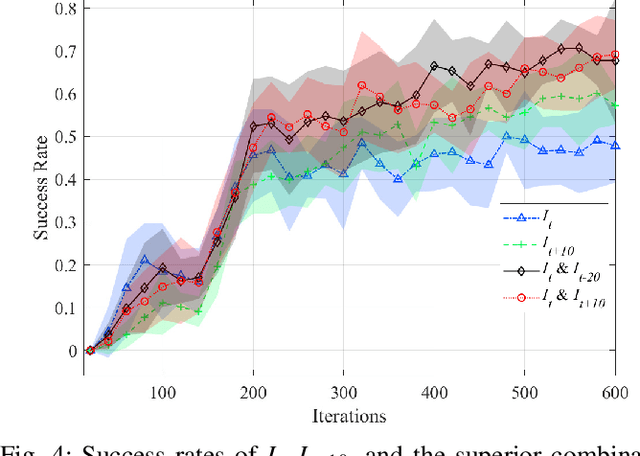
Many existing obstacle avoidance algorithms overlook the crucial balance between safety and agility, especially in environments of varying complexity. In our study, we introduce an obstacle avoidance pipeline based on reinforcement learning. This pipeline enables drones to adapt their flying speed according to the environmental complexity. Moreover, to improve the obstacle avoidance performance in cluttered environments, we propose a novel latent space. The latent space in this representation is explicitly trained to retain memory of previous depth map observations. Our findings confirm that varying speed leads to a superior balance of success rate and agility in cluttered environments. Additionally, our memory-augmented latent representation outperforms the latent representation commonly used in reinforcement learning. Finally, after minimal fine-tuning, we successfully deployed our network on a real drone for enhanced obstacle avoidance.