 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying a Quadrotor with Unknown Actuators and Sensor Configuration
Paper and Code
Sep 02, 2024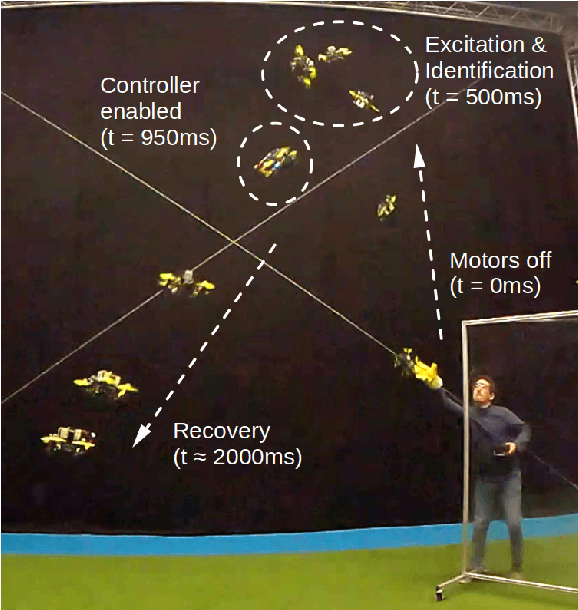
Though control algorithms for multirotor Unmanned Air Vehicle (UAV) are well understood, the configuration, parameter estimation, and tuning of flight control algorithms takes quite some time and resources. In previous work, we have shown that it is possible to identify the control effectiveness and motor dynamics of a multirotor fast enough for it to recover to a stable hover after being thrown 4 meters in the air. In this paper, we extend this to include estimation of the position of the Inertial Measurement Unit (IMU) relative to the Center of Gravity (CoG), estimation of the IMU rotation, the thrust direction of all motors and the optimal combined thrust direction. In order to guarantee a correct IMU position estimation, two prior throw-and-catches of the vehicle with spin around different axes are required. For these throws, a height as low as 1 meter is sufficient. Quadrotor flight experimentation confirms the efficacy of the approach, and a simulation shows its applicability to fully-actuated crafts with multiple possible hover orientations.