 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoRace: Winning Champion-Level Drone Racing with Robust Monocular AI
Jan 21, 2026Autonomous drone racing represents a major frontier in robotics research. It requires an Artificial Intelligence (AI) that can run on board light-weight flying robots under tight resource and time constraints, while pushing the physical system to its limits. The state of the art in this area consists of a system with a stereo camera and an inertial measurement unit (IMU) that beat human drone racing champions in a controlled indoor environment. Here, we present MonoRace: an onboard drone racing approach that uses a monocular, rolling-shutter camera and IMU that generalizes to a competition environment without any external motion tracking system. The approach features robust state estimation that combines neural-network-based gate segmentation with a drone model. Moreover, it includes an offline optimization procedure that leverages the known geometry of gates to refine any state estimation parameter. This offline optimization is based purely on onboard flight data and is important for fine-tuning the vital external camera calibration parameters. Furthermore, the guidance and control are performed by a neural network that foregoes inner loop controllers by directly sending motor commands. This small network runs on the flight controller at 500Hz. The proposed approach won the 2025 Abu Dhabi Autonomous Drone Racing Competition (A2RL), outperforming all competing AI teams and three human world champion pilots in a direct knockout tournament. It set a new milestone in autonomous drone racing research, reaching speeds up to 100 km/h on the competition track and successfully coping with problems such as camera interference and IMU saturation.
Rapid and Inexpensive Inertia Tensor Estimation from a Single Object Throw
Mar 17, 2025The inertia tensor is an important parameter in many engineering fields, but measuring it can be cumbersome and involve multiple experiments or accurate and expensive equipment. We propose a method to measure the moment of inertia tensor of a rigid body from a single spinning throw, by attaching a small and inexpensive stand-alone measurement device consisting of a gyroscope, accelerometer and a reaction wheel. The method includes a compensation for the increase of moment of inertia due to adding the measurement device to the body, and additionally obtains the location of the centre of gravity of the body as an intermediate result. Experiments performed with known rigid bodies show that the mean accuracy is around 2\%.
Flying a Quadrotor with Unknown Actuators and Sensor Configuration
Sep 02, 2024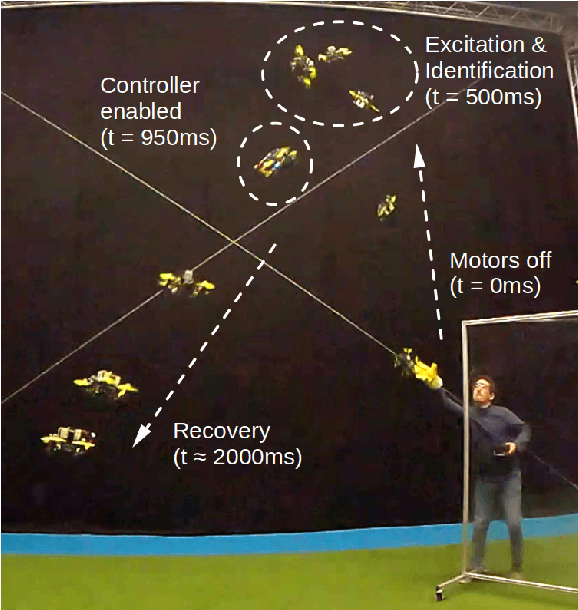
Though control algorithms for multirotor Unmanned Air Vehicle (UAV) are well understood, the configuration, parameter estimation, and tuning of flight control algorithms takes quite some time and resources. In previous work, we have shown that it is possible to identify the control effectiveness and motor dynamics of a multirotor fast enough for it to recover to a stable hover after being thrown 4 meters in the air. In this paper, we extend this to include estimation of the position of the Inertial Measurement Unit (IMU) relative to the Center of Gravity (CoG), estimation of the IMU rotation, the thrust direction of all motors and the optimal combined thrust direction. In order to guarantee a correct IMU position estimation, two prior throw-and-catches of the vehicle with spin around different axes are required. For these throws, a height as low as 1 meter is sufficient. Quadrotor flight experimentation confirms the efficacy of the approach, and a simulation shows its applicability to fully-actuated crafts with multiple possible hover orientations.
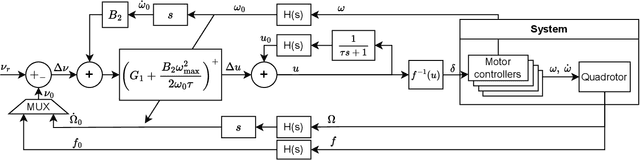
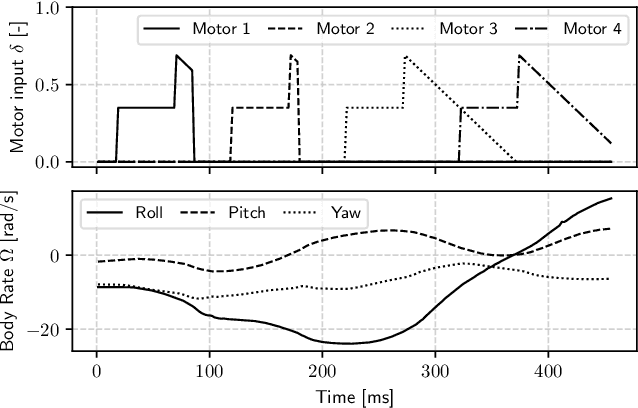
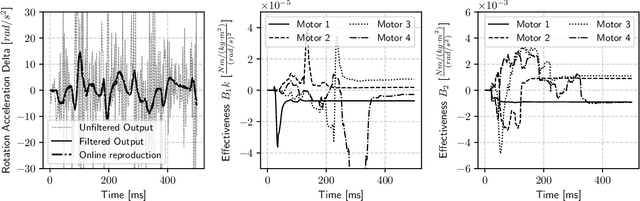
Control of Unknown Quadrotors from a Single Throw
Jun 17, 2024This paper presents a method to recover quadrotor UAV from a throw, when no control parameters are known before the throw. We leverage the availability of high-frequency rotor speed feedback available in racing drone hardware and software to find control effectiveness values and fit a motor model using recursive least squares (RLS) estimation. Furthermore, we propose an excitation sequence that provides large actuation commands while guaranteeing to stay within gyroscope sensing limits. After 450ms of excitation, an INDI attitude controller uses the 52 fitted parameters to arrest rotational motion and recover an upright attitude. Finally, a NDI position controller drives the craft to a position setpoint. The proposed algorithm runs efficiently on microcontrollers found in common UAV flight controllers, and was shown to recover an agile quadrotor every time in 57 live experiments with as low as 3.5m throw height, demonstrating robustness against initial rotations and noise. We also demonstrate control of randomized quadrotors in simulated throws, where the parameter fitting RMS error is typically within 10% of the true value.