 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Target Trajectory Prediction for Stochastic Targets
Apr 02, 2025



Trajectory prediction of other vehicles is crucial for autonomous vehicles, with applications from missile guidance to UAV collision avoidance. Typically, target trajectories are assumed deterministic, but real-world aerial vehicles exhibit stochastic behavior, such as evasive maneuvers or gliders circling in thermals. This paper uses Conditional Normalizing Flows, an unsupervised Machine Learning technique, to learn and predict the stochastic behavior of targets of guided missiles using trajectory data. The trained model predicts the distribution of future target positions based on initial conditions and parameters of the dynamics. Samples from this distribution are clustered using a time series k-means algorithm to generate representative trajectories, termed virtual targets. The method is fast and target-agnostic, requiring only training data in the form of target trajectories. Thus, it serves as a drop-in replacement for deterministic trajectory predictions in guidance laws and path planning. Simulated scenarios demonstrate the approach's effectiveness for aerial vehicles with random maneuvers, bridging the gap between deterministic predictions and stochastic reality, advancing guidance and control algorithms for autonomous vehicles.
First free-flight flow visualisation of a flapping-wing robot
Dec 22, 2016
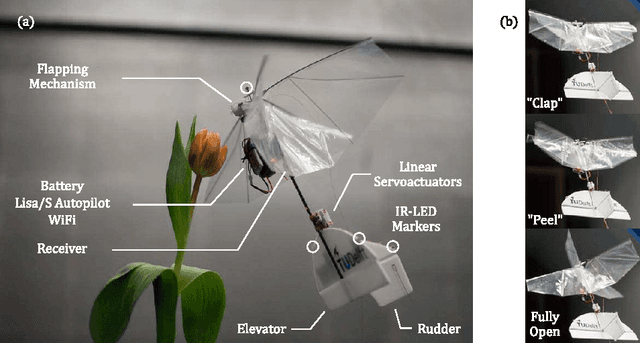
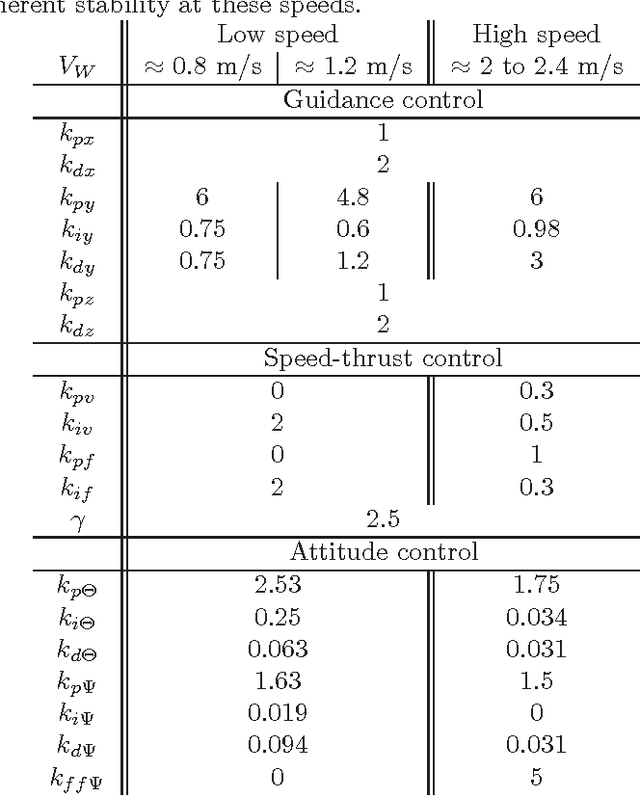
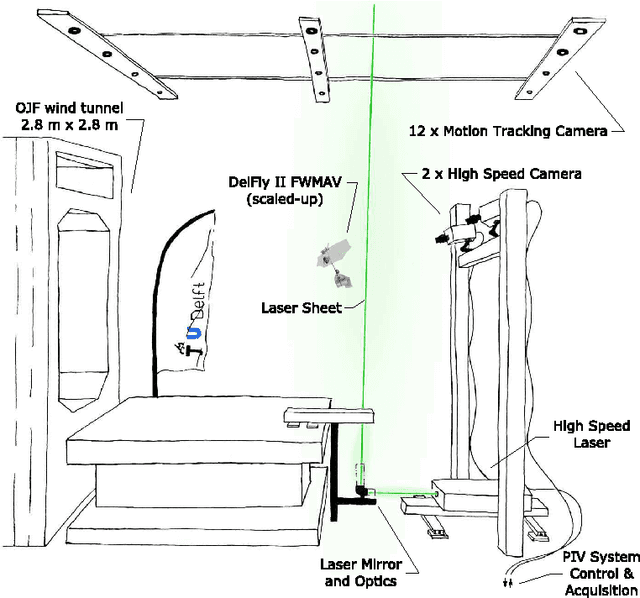
Flow visualisations are essential to better understand the unsteady aerodynamics of flapping wing flight. The issues inherent to animal experiments, such as poor controllability and unnatural flapping when tethered, can be avoided by using robotic flyers. Such an approach holds a promise for a more systematic and repeatable methodology for flow visualisation, through a better controlled flight. Such experiments require high precision position control, however, and until now this was not possible due to the challenging flight dynamics and payload restrictions of flapping wing Micro Air Vehicles (FWMAV). Here, we present a new FWMAV-specific control approach that, by employing an external motion tracking system, achieved autonomous wind tunnel flight with a maximum root-mean-square position error of 28 mm at low speeds (0.8 - 1.2 m/s) and 75 mm at high speeds (2 - 2.4 m/s). This allowed the first free-flight flow visualisation experiments to be conducted with an FWMAV. Time-resolved stereoscopic Particle Image Velocimetry (PIV) was used to reconstruct the 3D flow patterns of the FWMAV wake. A good qualitative match was found in comparison to a tethered configuration at similar conditions, suggesting that the obtained free-flight measurements are reliable and meaningful.