 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst free-flight flow visualisation of a flapping-wing robot
Dec 22, 2016
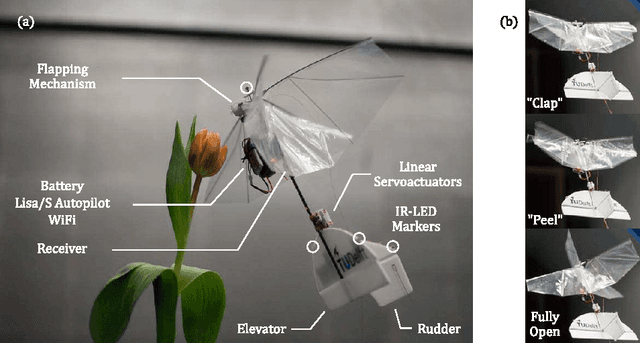
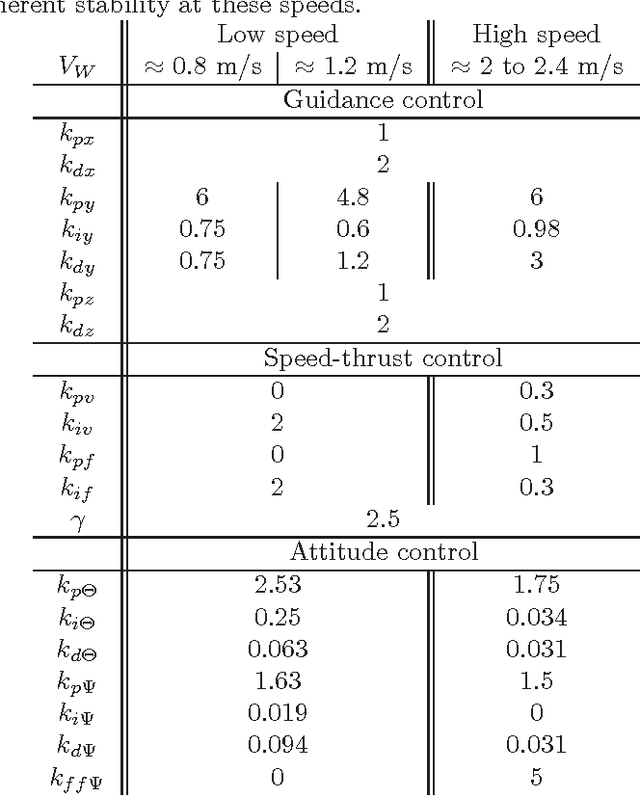
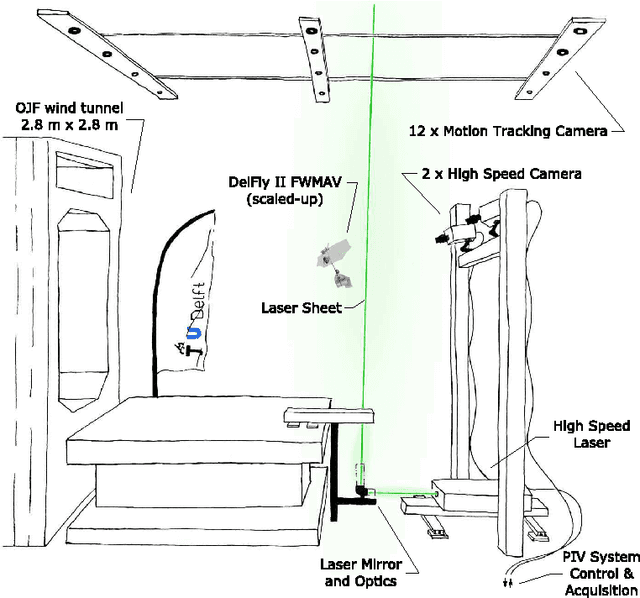
Flow visualisations are essential to better understand the unsteady aerodynamics of flapping wing flight. The issues inherent to animal experiments, such as poor controllability and unnatural flapping when tethered, can be avoided by using robotic flyers. Such an approach holds a promise for a more systematic and repeatable methodology for flow visualisation, through a better controlled flight. Such experiments require high precision position control, however, and until now this was not possible due to the challenging flight dynamics and payload restrictions of flapping wing Micro Air Vehicles (FWMAV). Here, we present a new FWMAV-specific control approach that, by employing an external motion tracking system, achieved autonomous wind tunnel flight with a maximum root-mean-square position error of 28 mm at low speeds (0.8 - 1.2 m/s) and 75 mm at high speeds (2 - 2.4 m/s). This allowed the first free-flight flow visualisation experiments to be conducted with an FWMAV. Time-resolved stereoscopic Particle Image Velocimetry (PIV) was used to reconstruct the 3D flow patterns of the FWMAV wake. A good qualitative match was found in comparison to a tethered configuration at similar conditions, suggesting that the obtained free-flight measurements are reliable and meaningful.