 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreaking the Circle: An Autonomous Control-Switching Strategy for Stable Orographic Soaring in MAVs
Oct 27, 2025Orographic soaring can significantly extend the endurance of micro aerial vehicles (MAVs), but circling behavior, arising from control conflicts between the longitudinal and vertical axes, increases energy consumption and the risk of divergence. We propose a control switching method, named SAOS: Switched Control for Autonomous Orographic Soaring, which mitigates circling behavior by selectively controlling either the horizontal or vertical axis, effectively transforming the system from underactuated to fully actuated during soaring. Additionally, the angle of attack is incorporated into the INDI controller to improve force estimation. Simulations with randomized initial positions and wind tunnel experiments on two MAVs demonstrate that the SAOS improves position convergence, reduces throttle usage, and mitigates roll oscillations caused by pitch-roll coupling. These improvements enhance energy efficiency and flight stability in constrained soaring environments.
AOSoar: Autonomous Orographic Soaring of a Micro Air Vehicle
Aug 01, 2023
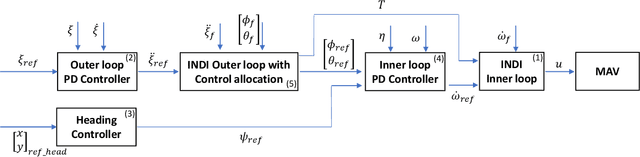
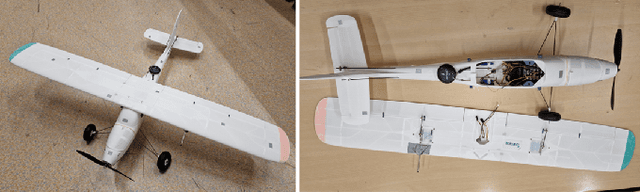
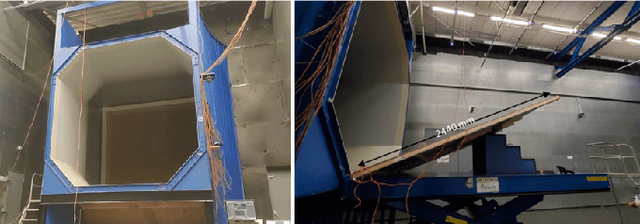
Utilizing wind hovering techniques of soaring birds can save energy expenditure and improve the flight endurance of micro air vehicles (MAVs). Here, we present a novel method for fully autonomous orographic soaring without a priori knowledge of the wind field. Specifically, we devise an Incremental Nonlinear Dynamic Inversion (INDI) controller with control allocation, adapting it for autonomous soaring. This allows for both soaring and the use of the throttle if necessary, without changing any gain or parameter during the flight. Furthermore, we propose a simulated-annealing-based optimization method to search for soaring positions. This enables for the first time an MAV to autonomously find a feasible soaring position while minimizing throttle usage and other control efforts. Autonomous orographic soaring was performed in the wind tunnel. The wind speed and incline of a ramp were changed during the soaring flight. The MAV was able to perform autonomous orographic soaring for flight times of up to 30 minutes. The mean throttle usage was only 0.25% for the entire soaring flight, whereas normal powered flight requires 38%. Also, it was shown that the MAV can find a new soaring spot when the wind field changes during the flight.
Autonomous Control for Orographic Soaring of Fixed-Wing UAVs
May 23, 2023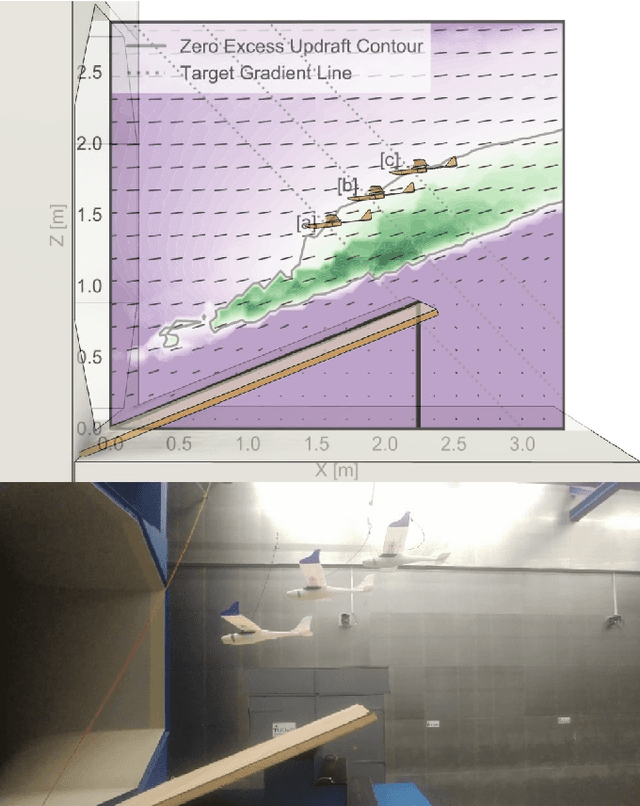
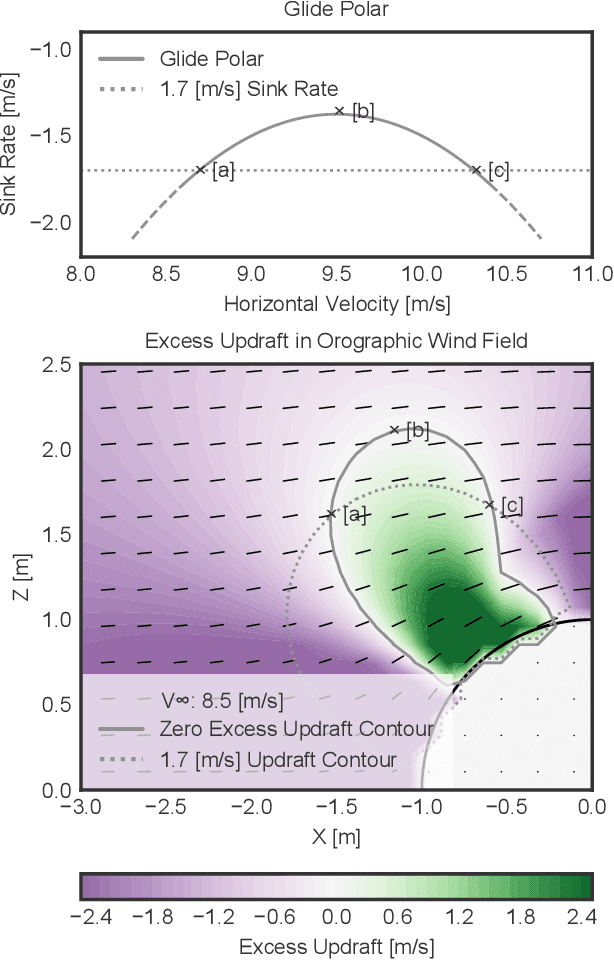
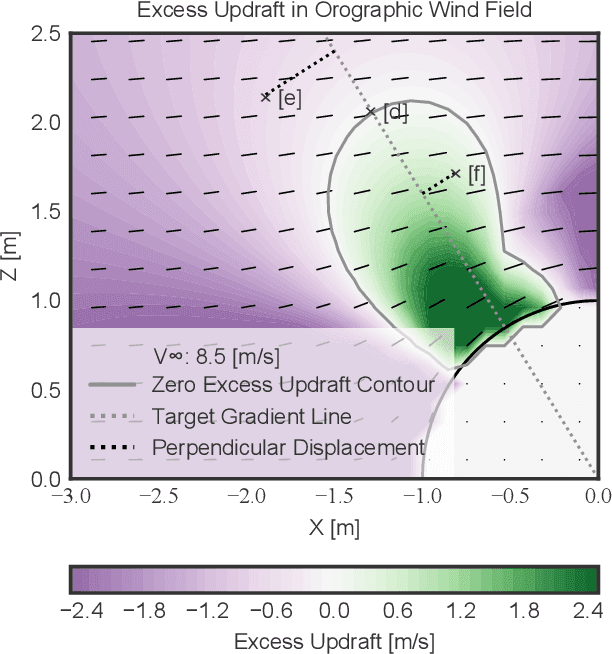
We present a novel controller for fixed-wing UAVs that enables autonomous soaring in an orographic wind field, extending flight endurance. Our method identifies soaring regions and addresses position control challenges by introducing a target gradient line (TGL) on which the UAV achieves an equilibrium soaring position, where sink rate and updraft are balanced. Experimental testing validates the controller's effectiveness in maintaining autonomous soaring flight without using any thrust in a non-static wind field. We also demonstrate a single degree of control freedom in a soaring position through manipulation of the TGL.