 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth-Consistent 3D Gaussian Splatting via Physical Defocus Modeling and Multi-View Geometric Supervision
Nov 13, 2025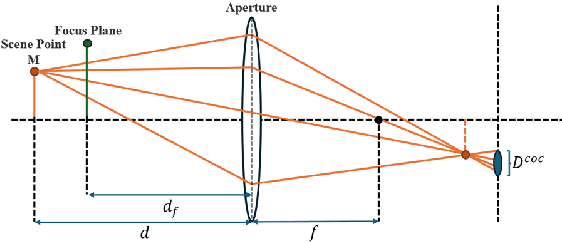
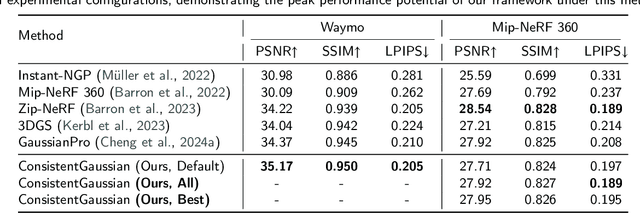
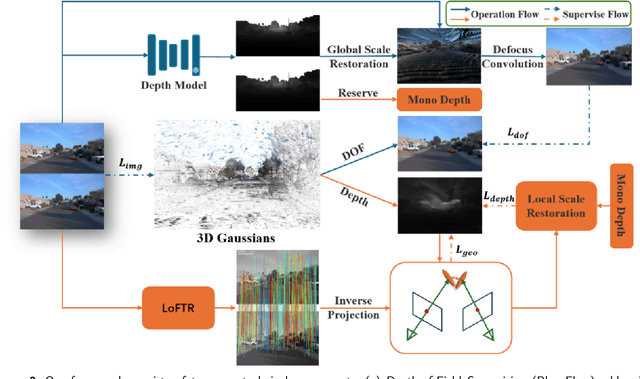

Three-dimensional reconstruction in scenes with extreme depth variations remains challenging due to inconsistent supervisory signals between near-field and far-field regions. Existing methods fail to simultaneously address inaccurate depth estimation in distant areas and structural degradation in close-range regions. This paper proposes a novel computational framework that integrates depth-of-field supervision and multi-view consistency supervision to advance 3D Gaussian Splatting. Our approach comprises two core components: (1) Depth-of-field Supervision employs a scale-recovered monocular depth estimator (e.g., Metric3D) to generate depth priors, leverages defocus convolution to synthesize physically accurate defocused images, and enforces geometric consistency through a novel depth-of-field loss, thereby enhancing depth fidelity in both far-field and near-field regions; (2) Multi-View Consistency Supervision employing LoFTR-based semi-dense feature matching to minimize cross-view geometric errors and enforce depth consistency via least squares optimization of reliable matched points. By unifying defocus physics with multi-view geometric constraints, our method achieves superior depth fidelity, demonstrating a 0.8 dB PSNR improvement over the state-of-the-art method on the Waymo Open Dataset. This framework bridges physical imaging principles and learning-based depth regularization, offering a scalable solution for complex depth stratification in urban environments.
GarmentX: Autoregressive Parametric Representations for High-Fidelity 3D Garment Generation
Apr 29, 2025This work presents GarmentX, a novel framework for generating diverse, high-fidelity, and wearable 3D garments from a single input image. Traditional garment reconstruction methods directly predict 2D pattern edges and their connectivity, an overly unconstrained approach that often leads to severe self-intersections and physically implausible garment structures. In contrast, GarmentX introduces a structured and editable parametric representation compatible with GarmentCode, ensuring that the decoded sewing patterns always form valid, simulation-ready 3D garments while allowing for intuitive modifications of garment shape and style. To achieve this, we employ a masked autoregressive model that sequentially predicts garment parameters, leveraging autoregressive modeling for structured generation while mitigating inconsistencies in direct pattern prediction. Additionally, we introduce GarmentX dataset, a large-scale dataset of 378,682 garment parameter-image pairs, constructed through an automatic data generation pipeline that synthesizes diverse and high-quality garment images conditioned on parametric garment representations. Through integrating our method with GarmentX dataset, we achieve state-of-the-art performance in geometric fidelity and input image alignment, significantly outperforming prior approaches. We will release GarmentX dataset upon publication.
Metamon-GS: Enhancing Representability with Variance-Guided Densification and Light Encoding
Apr 20, 2025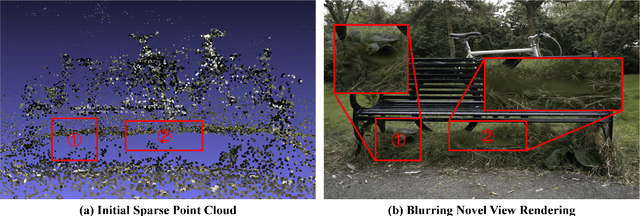
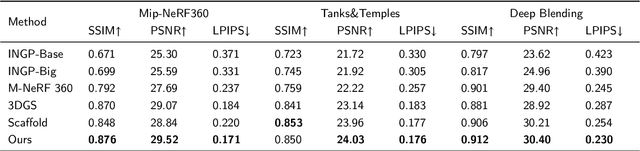
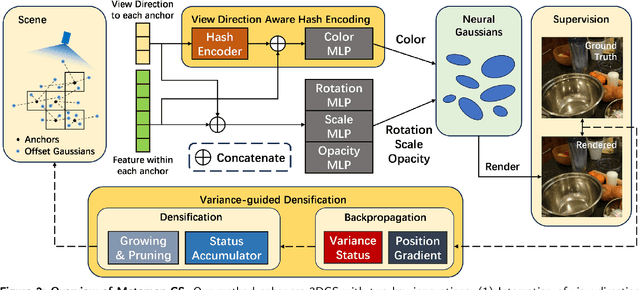
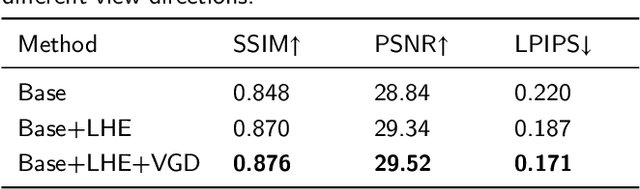
The introduction of 3D Gaussian Splatting (3DGS) has advanced novel view synthesis by utilizing Gaussians to represent scenes. Encoding Gaussian point features with anchor embeddings has significantly enhanced the performance of newer 3DGS variants. While significant advances have been made, it is still challenging to boost rendering performance. Feature embeddings have difficulty accurately representing colors from different perspectives under varying lighting conditions, which leads to a washed-out appearance. Another reason is the lack of a proper densification strategy that prevents Gaussian point growth in thinly initialized areas, resulting in blurriness and needle-shaped artifacts. To address them, we propose Metamon-GS, from innovative viewpoints of variance-guided densification strategy and multi-level hash grid. The densification strategy guided by variance specifically targets Gaussians with high gradient variance in pixels and compensates for the importance of regions with extra Gaussians to improve reconstruction. The latter studies implicit global lighting conditions and accurately interprets color from different perspectives and feature embeddings. Our thorough experiments on publicly available datasets show that Metamon-GS surpasses its baseline model and previous versions, delivering superior quality in rendering novel views.
AG-NeRF: Attention-guided Neural Radiance Fields for Multi-height Large-scale Outdoor Scene Rendering
Apr 18, 2024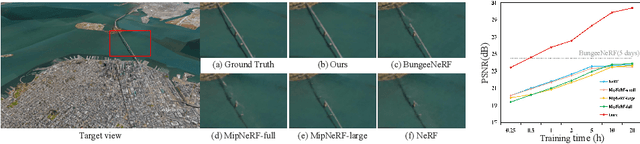
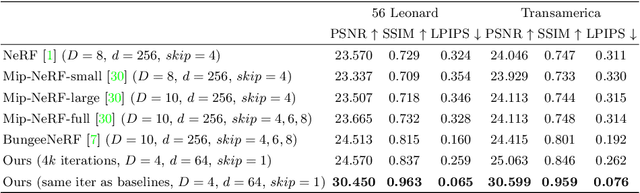
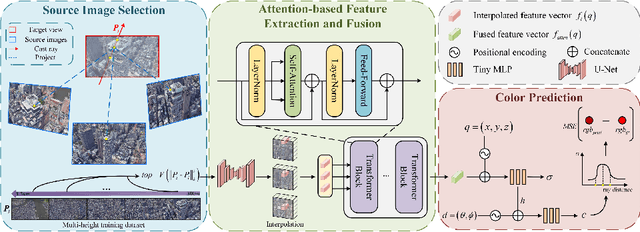
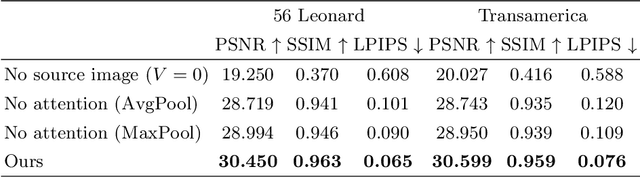
Existing neural radiance fields (NeRF)-based novel view synthesis methods for large-scale outdoor scenes are mainly built on a single altitude. Moreover, they often require a priori camera shooting height and scene scope, leading to inefficient and impractical applications when camera altitude changes. In this work, we propose an end-to-end framework, termed AG-NeRF, and seek to reduce the training cost of building good reconstructions by synthesizing free-viewpoint images based on varying altitudes of scenes. Specifically, to tackle the detail variation problem from low altitude (drone-level) to high altitude (satellite-level), a source image selection method and an attention-based feature fusion approach are developed to extract and fuse the most relevant features of target view from multi-height images for high-fidelity rendering. Extensive experiments demonstrate that AG-NeRF achieves SOTA performance on 56 Leonard and Transamerica benchmarks and only requires a half hour of training time to reach the competitive PSNR as compared to the latest BungeeNeRF.
PointCore: Efficient Unsupervised Point Cloud Anomaly Detector Using Local-Global Features
Mar 04, 2024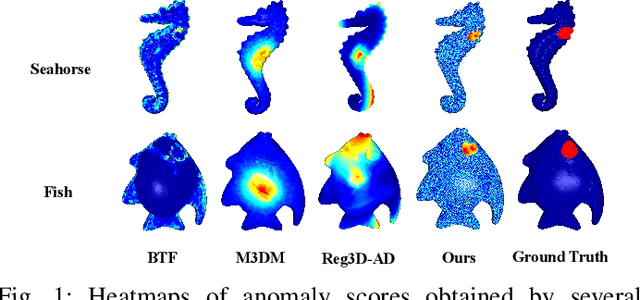
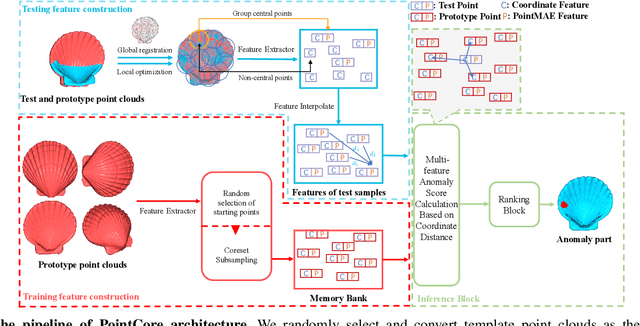
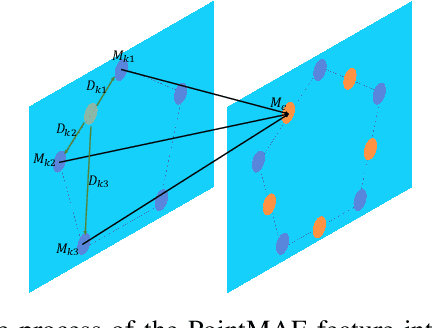
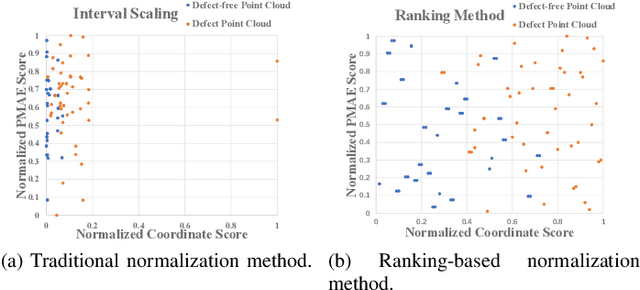
Three-dimensional point cloud anomaly detection that aims to detect anomaly data points from a training set serves as the foundation for a variety of applications, including industrial inspection and autonomous driving. However, existing point cloud anomaly detection methods often incorporate multiple feature memory banks to fully preserve local and global representations, which comes at the high cost of computational complexity and mismatches between features. To address that, we propose an unsupervised point cloud anomaly detection framework based on joint local-global features, termed PointCore. To be specific, PointCore only requires a single memory bank to store local (coordinate) and global (PointMAE) representations and different priorities are assigned to these local-global features, thereby reducing the computational cost and mismatching disturbance in inference. Furthermore, to robust against the outliers, a normalization ranking method is introduced to not only adjust values of different scales to a notionally common scale, but also transform densely-distributed data into a uniform distribution. Extensive experiments on Real3D-AD dataset demonstrate that PointCore achieves competitive inference time and the best performance in both detection and localization as compared to the state-of-the-art Reg3D-AD approach and several competitors.