 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAVbot: An Autonomous Target Tracking Micro-Robot with Frequency Actuation Control
Jan 26, 2025



Robotic autonomy at centimeter scale requires compact and miniaturization-friendly actuation integrated with sensing and neural network processing assembly within a tiny form factor. Applications of such systems have witnessed significant advancements in recent years in fields such as healthcare, manufacturing, and post-disaster rescue. The system design at this scale puts stringent constraints on power consumption for both the sensory front-end and actuation back-end and the weight of the electronic assembly for robust operation. In this paper, we introduce FAVbot, the first autonomous mobile micro-robotic system integrated with a novel actuation mechanism and convolutional neural network (CNN) based computer vision - all integrated within a compact 3-cm form factor. The novel actuation mechanism utilizes mechanical resonance phenomenon to achieve frequency-controlled steering with a single piezoelectric actuator. Experimental results demonstrate the effectiveness of FAVbot's frequency-controlled actuation, which offers a diverse selection of resonance modes with different motion characteristics. The actuation system is complemented with the vision front-end where a camera along with a microcontroller supports object detection for closed-loop control and autonomous target tracking. This enables adaptive navigation in dynamic environments. This work contributes to the evolving landscape of neural network-enabled micro-robotic systems showing the smallest autonomous robot built using controllable multi-directional single-actuator mechanism.
Robotic Computing on FPGAs: Current Progress, Research Challenges, and Opportunities
May 14, 2022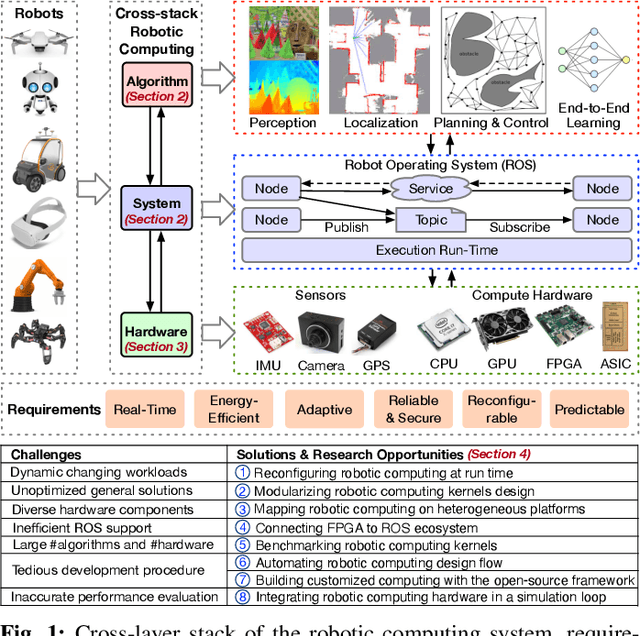
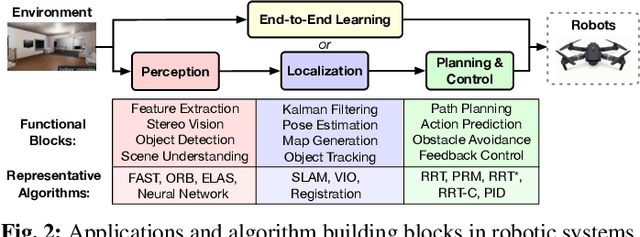
Robotic computing has reached a tipping point, with a myriad of robots (e.g., drones, self-driving cars, logistic robots) being widely applied in diverse scenarios. The continuous proliferation of robotics, however, critically depends on efficient computing substrates, driven by real-time requirements, robotic size-weight-and-power constraints, cybersecurity considerations, and dynamically changing scenarios. Within all platforms, FPGA is able to deliver both software and hardware solutions with low power, high performance, reconfigurability, reliability, and adaptivity characteristics, serving as the promising computing substrate for robotic applications. This paper highlights the current progress, design techniques, challenges, and open research challenges in the domain of robotic computing on FPGAs.