 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Computing on FPGAs: Current Progress, Research Challenges, and Opportunities
Paper and Code
May 14, 2022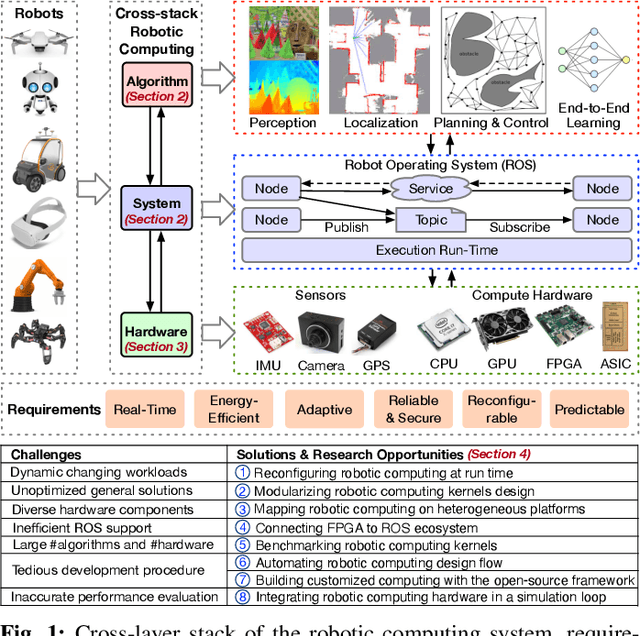
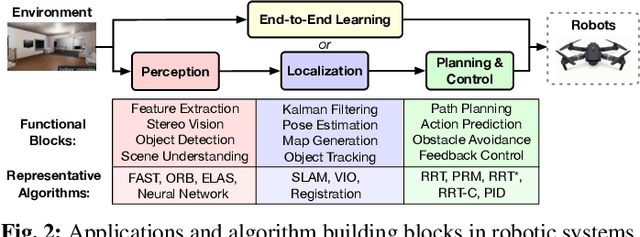
Robotic computing has reached a tipping point, with a myriad of robots (e.g., drones, self-driving cars, logistic robots) being widely applied in diverse scenarios. The continuous proliferation of robotics, however, critically depends on efficient computing substrates, driven by real-time requirements, robotic size-weight-and-power constraints, cybersecurity considerations, and dynamically changing scenarios. Within all platforms, FPGA is able to deliver both software and hardware solutions with low power, high performance, reconfigurability, reliability, and adaptivity characteristics, serving as the promising computing substrate for robotic applications. This paper highlights the current progress, design techniques, challenges, and open research challenges in the domain of robotic computing on FPGAs.