 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFAVbot: An Autonomous Target Tracking Micro-Robot with Frequency Actuation Control
Jan 26, 2025



Robotic autonomy at centimeter scale requires compact and miniaturization-friendly actuation integrated with sensing and neural network processing assembly within a tiny form factor. Applications of such systems have witnessed significant advancements in recent years in fields such as healthcare, manufacturing, and post-disaster rescue. The system design at this scale puts stringent constraints on power consumption for both the sensory front-end and actuation back-end and the weight of the electronic assembly for robust operation. In this paper, we introduce FAVbot, the first autonomous mobile micro-robotic system integrated with a novel actuation mechanism and convolutional neural network (CNN) based computer vision - all integrated within a compact 3-cm form factor. The novel actuation mechanism utilizes mechanical resonance phenomenon to achieve frequency-controlled steering with a single piezoelectric actuator. Experimental results demonstrate the effectiveness of FAVbot's frequency-controlled actuation, which offers a diverse selection of resonance modes with different motion characteristics. The actuation system is complemented with the vision front-end where a camera along with a microcontroller supports object detection for closed-loop control and autonomous target tracking. This enables adaptive navigation in dynamic environments. This work contributes to the evolving landscape of neural network-enabled micro-robotic systems showing the smallest autonomous robot built using controllable multi-directional single-actuator mechanism.
Bidirectional Microrocker Bots with Sharp Tips Actuated by a Single Electromagnet
Oct 21, 2020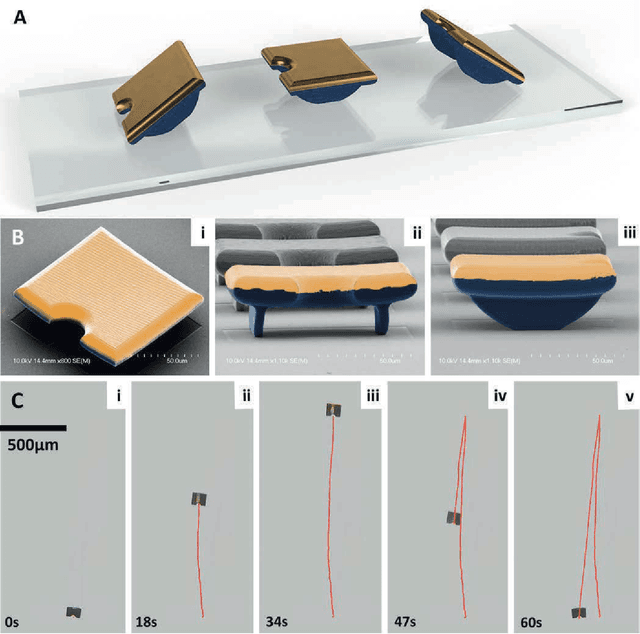
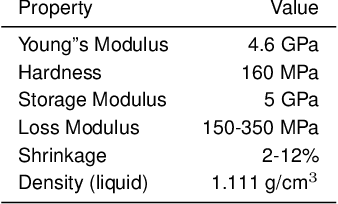
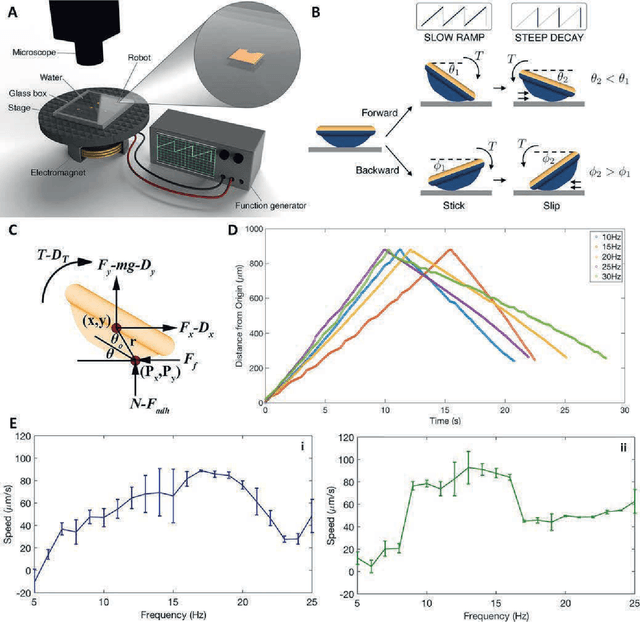
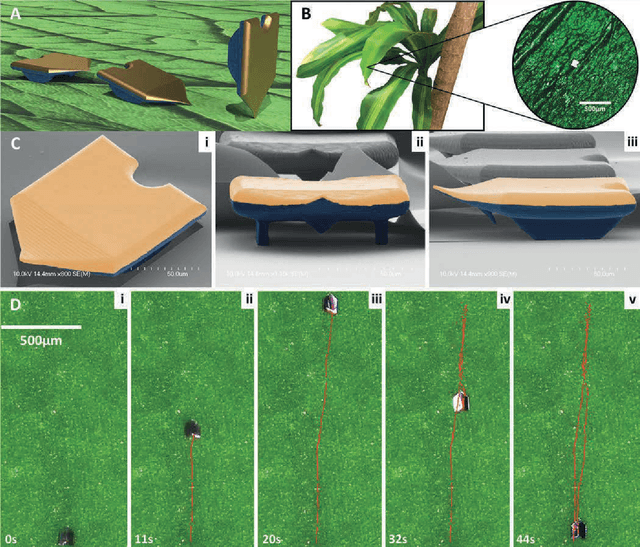
The recent advancements in nanoscale 3D printing and microfabrication techniques have reinvigorated research on microrobotics and nanomachines. However, precise control of the robot motion and navigation on biological environments have remained challenging to date. This work presents the first demonstration of magnetic microscale rocker robot (microrocker bot) capable of bidirectional movement on flat as well as biological surfaces, when actuated by a single compact electromagnet. The 100um by 113um by 36um robot was 3D printed via two-photon lithography and subsequently coated with a nickel (Ni) thin film. When actuated by an externally applied magnetic sawtooth field, the robot demonstrated stick-slip motion enabled by its rockers. The controllable bidirectional motion is enabled by adjusting the DC offset of the waveform, which tilts the robot and biases it towards either forward or backward motion. The microrocker bots are further equipped with sharp tips that can get engaged via application of DC-only or low frequency magnetic fields. This novel control method offers an attractive solution to replace the multiple bulky coils traditionally used for magnetic actuation and control, as well as allows for a more flexible and simple approach towards microrobotics motion control. When the frequency and offset of the sawtooth waveform are optimized, the robot travels up to 87ums (0.87 body length per second) forward and backward with minor deviance from linear trajectories. Finally, to prove the robot's capabilities in direct contact with biological environments, we demonstrate the microbot's ability to traverse forward and backward on the surface of a Dracaena Fragrans (corn plant), as well as upend on its mechanical tip.
On the Forward and Backward Motion of Milli-Bristle-Bots
Feb 24, 2020



This works presents the theoretical analysis and experimental observations of bidirectional motion of a millimeter-scale bristle robot (milli-bristle-bot) with an on-board piezoelectric actuator. First, the theory of the motion, based on the dry-friction model, is developed and the frequency regions of the forward and backward motion, along with resonant frequencies of the system are predicted. Secondly, milli-bristle-bots with two different bristle tilt angles are fabricated, and their bidirectional motions are experimentally investigated. The dependency of the robot speed on the actuation frequency is studied,which reveals two distinct frequency regions for the forward and backward motions that well matches our theoretical predictions. Furthermore, the dependencies of the resonance frequency and robot speed on the bristle tilt angle are experimentally studied and tied to the theoretical model. This work marks the first demonstration of bidirectional motion at millimeter-scales, achieved for bristle-bots with a single on-board actuator.