 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoving Matter: Efficient Reconfiguration of Tile Arrangements by a Single Active Robot
Feb 13, 2025
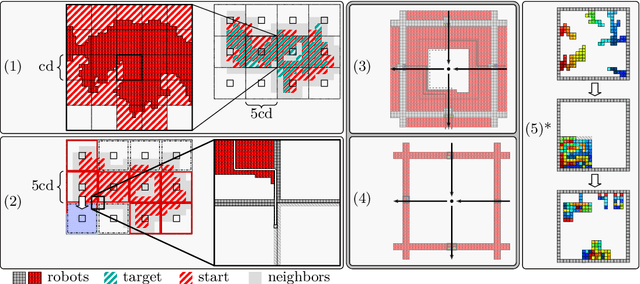
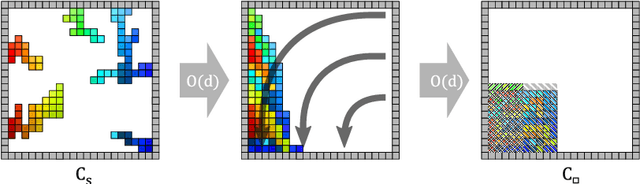
We consider the problem of reconfiguring a two-dimensional connected grid arrangement of passive building blocks from a start configuration to a goal configuration, using a single active robot that can move on the tiles, remove individual tiles from a given location and physically move them to a new position by walking on the remaining configuration. The objective is to determine a reconfiguration schedule that minimizes the overall makespan, while ensuring that the tile configuration remains connected. We provide both negative and positive results. (1) We present a generalized version of the problem, parameterized by weighted costs for moving with or without tiles, and show that this is NP-complete. (2) We give a polynomial-time constant-factor approximation algorithm for the case of disjoint start and target bounding boxes. In addition, our approach yields optimal carry distance for 2-scaled instances.
Focused Active Learning for Histopathological Image Classification
Apr 06, 2024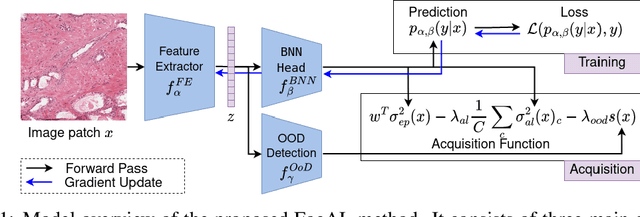
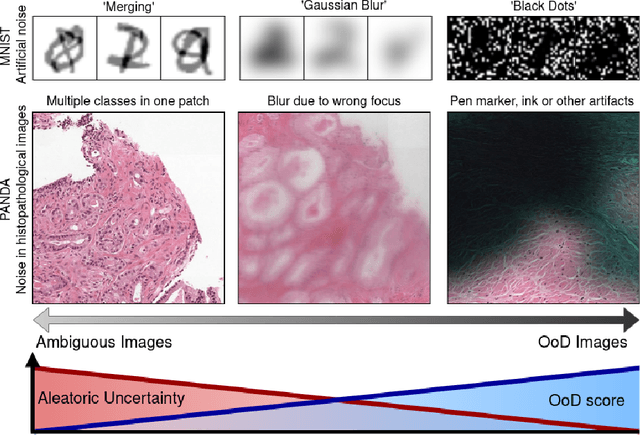
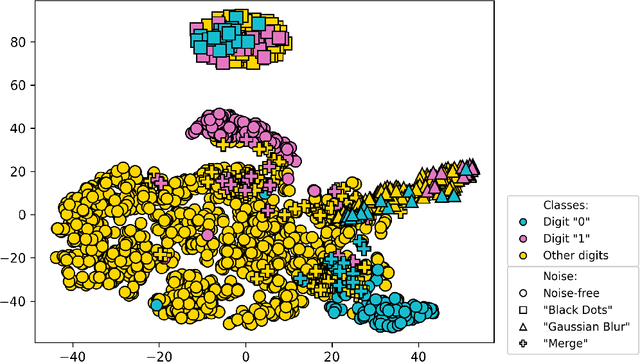
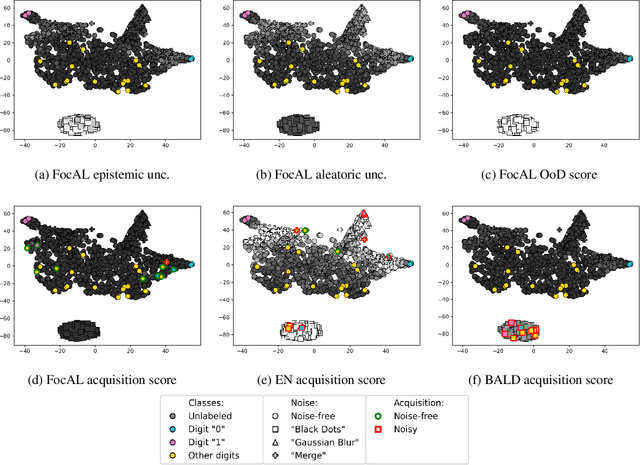
Active Learning (AL) has the potential to solve a major problem of digital pathology: the efficient acquisition of labeled data for machine learning algorithms. However, existing AL methods often struggle in realistic settings with artifacts, ambiguities, and class imbalances, as commonly seen in the medical field. The lack of precise uncertainty estimations leads to the acquisition of images with a low informative value. To address these challenges, we propose Focused Active Learning (FocAL), which combines a Bayesian Neural Network with Out-of-Distribution detection to estimate different uncertainties for the acquisition function. Specifically, the weighted epistemic uncertainty accounts for the class imbalance, aleatoric uncertainty for ambiguous images, and an OoD score for artifacts. We perform extensive experiments to validate our method on MNIST and the real-world Panda dataset for the classification of prostate cancer. The results confirm that other AL methods are 'distracted' by ambiguities and artifacts which harm the performance. FocAL effectively focuses on the most informative images, avoiding ambiguities and artifacts during acquisition. For both experiments, FocAL outperforms existing AL approaches, reaching a Cohen's kappa of 0.764 with only 0.69% of the labeled Panda data.
Introducing instance label correlation in multiple instance learning. Application to cancer detection on histopathological images
Oct 30, 2023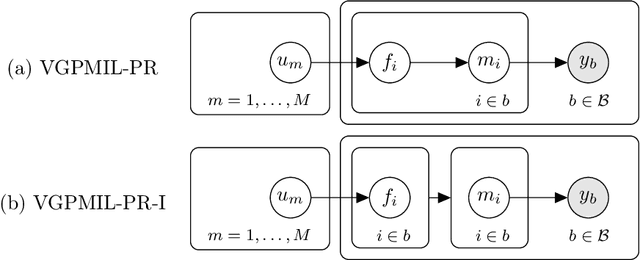
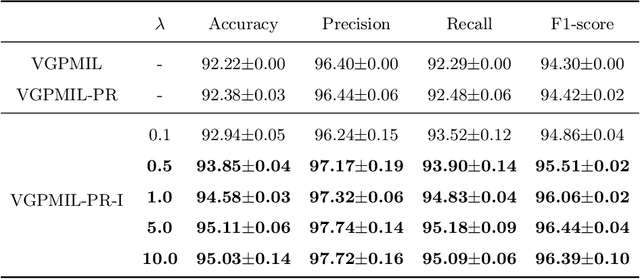
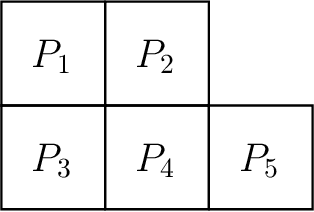
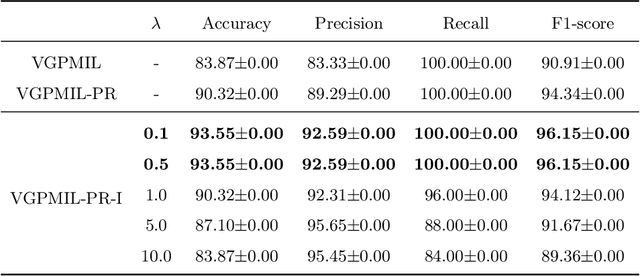
In the last years, the weakly supervised paradigm of multiple instance learning (MIL) has become very popular in many different areas. A paradigmatic example is computational pathology, where the lack of patch-level labels for whole-slide images prevents the application of supervised models. Probabilistic MIL methods based on Gaussian Processes (GPs) have obtained promising results due to their excellent uncertainty estimation capabilities. However, these are general-purpose MIL methods that do not take into account one important fact: in (histopathological) images, the labels of neighboring patches are expected to be correlated. In this work, we extend a state-of-the-art GP-based MIL method, which is called VGPMIL-PR, to exploit such correlation. To do so, we develop a novel coupling term inspired by the statistical physics Ising model. We use variational inference to estimate all the model parameters. Interestingly, the VGPMIL-PR formulation is recovered when the weight that regulates the strength of the Ising term vanishes. The performance of the proposed method is assessed in two real-world problems of prostate cancer detection. We show that our model achieves better results than other state-of-the-art probabilistic MIL methods. We also provide different visualizations and analysis to gain insights into the influence of the novel Ising term. These insights are expected to facilitate the application of the proposed model to other research areas.
Probabilistic Modeling of Inter- and Intra-observer Variability in Medical Image Segmentation
Jul 21, 2023



Medical image segmentation is a challenging task, particularly due to inter- and intra-observer variability, even between medical experts. In this paper, we propose a novel model, called Probabilistic Inter-Observer and iNtra-Observer variation NetwOrk (Pionono). It captures the labeling behavior of each rater with a multidimensional probability distribution and integrates this information with the feature maps of the image to produce probabilistic segmentation predictions. The model is optimized by variational inference and can be trained end-to-end. It outperforms state-of-the-art models such as STAPLE, Probabilistic U-Net, and models based on confusion matrices. Additionally, Pionono predicts multiple coherent segmentation maps that mimic the rater's expert opinion, which provides additional valuable information for the diagnostic process. Experiments on real-world cancer segmentation datasets demonstrate the high accuracy and efficiency of Pionono, making it a powerful tool for medical image analysis.
Computing Motion Plans for Assembling Particles with Global Control
Jul 06, 2023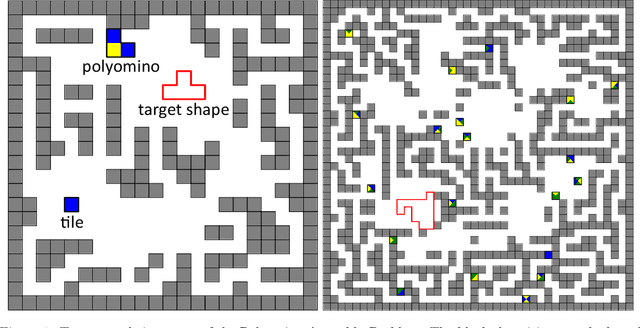
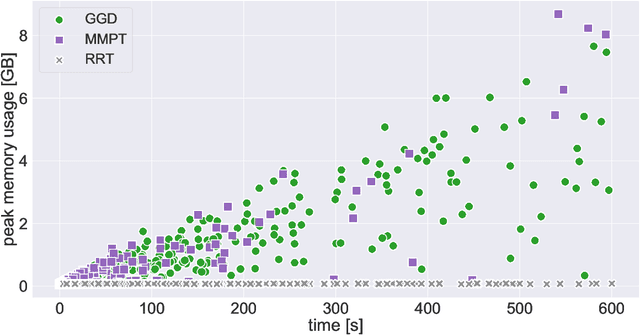
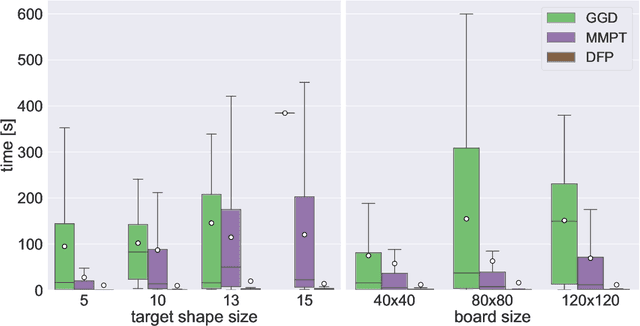
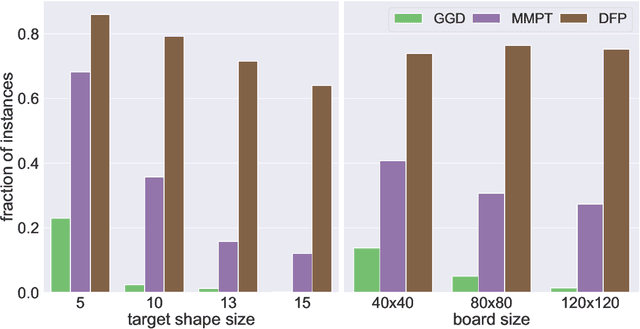
We investigate motion planning algorithms for the assembly of shapes in the \emph{tilt model} in which unit-square tiles move in a grid world under the influence of uniform external forces and self-assemble according to certain rules. We provide several heuristics and experimental evaluation of their success rate, solution length, runtime, and memory consumption.
Probabilistic Attention based on Gaussian Processes for Deep Multiple Instance Learning
Feb 08, 2023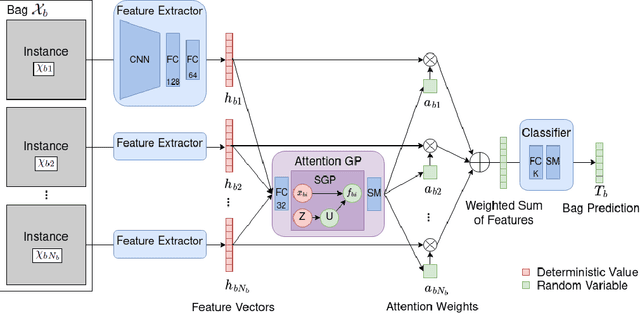
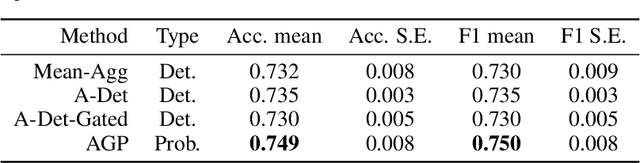
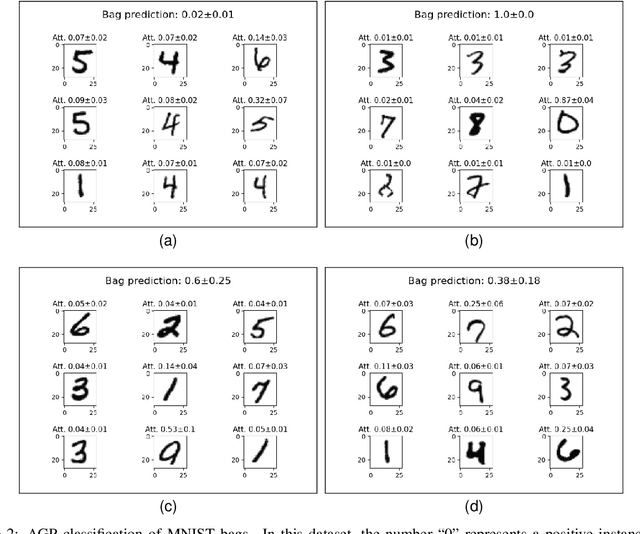
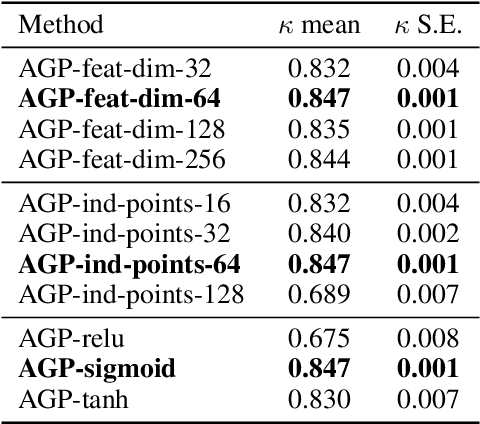
Multiple Instance Learning (MIL) is a weakly supervised learning paradigm that is becoming increasingly popular because it requires less labeling effort than fully supervised methods. This is especially interesting for areas where the creation of large annotated datasets remains challenging, as in medicine. Although recent deep learning MIL approaches have obtained state-of-the-art results, they are fully deterministic and do not provide uncertainty estimations for the predictions. In this work, we introduce the Attention Gaussian Process (AGP) model, a novel probabilistic attention mechanism based on Gaussian Processes for deep MIL. AGP provides accurate bag-level predictions as well as instance-level explainability, and can be trained end-to-end. Moreover, its probabilistic nature guarantees robustness to overfitting on small datasets and uncertainty estimations for the predictions. The latter is especially important in medical applications, where decisions have a direct impact on the patient's health. The proposed model is validated experimentally as follows. First, its behavior is illustrated in two synthetic MIL experiments based on the well-known MNIST and CIFAR-10 datasets, respectively. Then, it is evaluated in three different real-world cancer detection experiments. AGP outperforms state-of-the-art MIL approaches, including deterministic deep learning ones. It shows a strong performance even on a small dataset with less than 100 labels and generalizes better than competing methods on an external test set. Moreover, we experimentally show that predictive uncertainty correlates with the risk of wrong predictions, and therefore it is a good indicator of reliability in practice. Our code is publicly available.
Efficiently Reconfiguring a Connected Swarm of Labeled Robots
Sep 22, 2022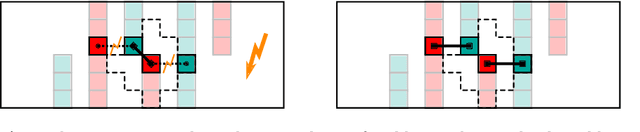

When considering motion planning for a swarm of $n$ labeled robots, we need to rearrange a given start configuration into a desired target configuration via a sequence of parallel, continuous, collision-free robot motions. The objective is to reach the new configuration in a minimum amount of time; an important constraint is to keep the swarm connected at all times. Problems of this type have been considered before, with recent notable results achieving constant stretch for not necessarily connected reconfiguration: If mapping the start configuration to the target configuration requires a maximum Manhattan distance of $d$, the total duration of an overall schedule can be bounded to $\mathcal{O}(d)$, which is optimal up to constant factors. However, constant stretch could only be achieved if disconnected reconfiguration is allowed, or for scaled configurations (which arise by increasing all dimensions of a given object by the same multiplicative factor) of unlabeled robots. We resolve these major open problems by (1) establishing a lower bound of $\Omega(\sqrt{n})$ for connected, labeled reconfiguration and, most importantly, by (2) proving that for scaled arrangements, constant stretch for connected reconfiguration can be achieved. In addition, we show that (3) it is NP-hard to decide whether a makespan of 2 can be achieved, while it is possible to check in polynomial time whether a makespan of 1 can be achieved.